Chao Liu

Research Interests: Swarm Robotics, Modular Robotics, Motion Planning and Control
Office: Perch
Email: chaoliu at seas.upenn.edu
Personal Page
Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png)
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) H. Liu, K. Smith, Z. Yang, and M. Yim, “Real-time two-tape control system in vine robots,” Arxiv, 2025.
H. Liu, K. Smith, Z. Yang, and M. Yim, “Real-time two-tape control system in vine robots,” Arxiv, 2025.
[Bibtex]@article{liu2025realtimetwotapecontrolvine, title={Real-time Two-tape Control System in Vine robots}, author={Hanmo Liu and Kayleen Smith and Zimu Yang and Mark Yim}, journal = {arXiv}, year={2025}, eprint={https://arxiv.org/abs/2505.00969}, archivePrefix={arXiv}, primaryClass={cs.RO}, doi={https://doi.org/10.48550/arXiv.2505.00969}, url={https://arxiv.org/abs/2505.00969}, pdf={https://arxiv.org/pdf/2505.00969} } - C. Liu, Q. Lin, H. Kim, and M. Yim, “SMORES-EP, a modular robot with parallel self-assembly,” Autonomous robots, 2022.
[Bibtex]@article{CL:QL:HK:MY:21, title = {{SMORES-EP}, a Modular Robot with Parallel Self-assembly}, author = {Liu, Chao and Lin, Qian and Kim, Hyun and Yim, Mark}, journal = {Autonomous Robots}, year = {2022}, doi = {10.1007/s10514-022-10078-1}, url = {https://doi.org/10.1007/s10514-022-10078-1}, issn = {1573-7527}, pdf = {https://arxiv.org/pdf/2104.00800.pdf} } - C. Liu, Q. Lin, H. Kim, and M. Yim, “Smores-ep, a modular robot with parallel self-assembly,” Autonomous robots, vol. 47, iss. 2, pp. 211-228, 2023.
[Bibtex]@article{liu_lin_kim_yim_2023, title={SMORES-EP, a modular robot with parallel self-assembly}, volume={47}, ISSN={0929-5593}, DOI={10.1007/s10514-022-10078-1}, number={2}, journal={Autonomous Robots}, publisher={Autonomous Robots}, author={Liu, Chao and Lin, Qian and Kim, Hyun and Yim, Mark}, year={2023}, pages={211-228}, pdf ={https://arxiv.org/pdf/2104.00800.pdf} } - C. Liu, S. Yu, and M. Yim, “Motion planning for variable topology trusses: reconfiguration and locomotion,” Ieee transactions on robotics, vol. 39, iss. 3, pp. 2020-2039, 2023.
[Bibtex]@ARTICLE{10026546, author={Liu, Chao and Yu, Sencheng and Yim, Mark}, journal={IEEE Transactions on Robotics}, title={Motion Planning for Variable Topology Trusses: Reconfiguration and Locomotion}, year={2023}, volume={39}, number={3}, pages={2020-2039}, keywords={Robots;Planning;Topology;Kinematics;Geometry;Task analysis;Shape;Cellular and modular robots;kinematics;motion and path planning;parallel robots}, doi={10.1109/TRO.2022.3228400}, pdf={https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10026546} } - C. Liu, S. Yu, and M. Yim, “Motion planning for variable topology trusses: reconfiguration and locomotion,” Ieee transactions on robotics, pp. 1-20, 2022.
[Bibtex]@ARTICLE{CL:SY:MY:22, author = {Liu, Chao and Yu, Sencheng and Yim, Mark}, journal = {IEEE Transactions on Robotics}, title = {Motion Planning for Variable Topology Trusses: Reconfiguration and Locomotion}, year = {2022}, volume = {}, number = {}, pages = {1-20}, doi = {10.1109/TRO.2022.3228400} } - C. Liu and M. Yim, “A quadratic programming approach to manipulation in real-time using modular robots,” The international journal of robotic computing (invited), vol. 3, iss. 1, pp. 121-145, 2021.
[Bibtex]@ARTICLE{CL:MY:21, author = {Chao {Liu} and Mark {Yim}}, journal = {The International Journal of Robotic Computing (Invited)}, title = {A Quadratic Programming Approach to Manipulation in Real-Time Using Modular Robots}, year = 2021, volume = 3, number = 1, pages = {121-145}, doi = {10.35708/RC1870-126268}, pdf = {https://www.modlabupenn.org/wp-content/uploads/2021/08/Liu_ijrc_2021.pdf} } - C. Liu, T. Tosun, and M. Yim, “A low-cost, highly customizable solution for position estimation in modular robots,” Journal of mechanisms and robotics, 2021.
[Bibtex]@article{CL:TT:MY:21, author = {Chao {Liu} and Tarik {Tosun} and Mark {Yim}}, title = {A Low-Cost, Highly Customizable Solution for Position Estimation in Modular Robots}, journal = {Journal of Mechanisms and Robotics}, year = 2021, doi = {10.1115/1.4050249}, pdf = {https://arxiv.org/abs/2201.03719} } - C. Liu, S. Yu, and M. Yim, “Motion planning for variable topology truss modular robot,” in Proceedings of robotics: science and systems, 2020.
[Bibtex]@inproceedings{CL:SY:MY:20, title = {Motion Planning for Variable Topology Truss Modular Robot}, author = {Liu, Chao and Yu, Sencheng and Yim, Mark}, booktitle = {Proceedings of Robotics: Science and Systems}, year = {2020}, MONTH = {July}, pdf = {https://www.modlabupenn.org/wp-content/uploads/2020/11/liu_vtt_rss_2020.pdf}, doi = {10.15607/RSS.2020.XVI.052} } - C. Liu, S. Yu, and M. Yim, “A fast configuration space algorithm for variable topology truss modular robots,” in 2020 international conference on robotics and automation (icra), Paris, France, 2020, pp. 8260-8266.
[Bibtex]@INPROCEEDINGS{CL:SY:MY:icra:20, author={C. {Liu} and S. {Yu} and M. {Yim}}, booktitle={2020 International Conference on Robotics and Automation (ICRA)}, title={A Fast Configuration Space Algorithm for Variable Topology Truss Modular Robots}, year={2020}, pages={8260-8266}, ISSN={}, month={May}, address={Paris, France}, doi={10.1109/ICRA40945.2020.9196880}, pdf={https://www.modlabupenn.org/wp-content/uploads/2021/04/Liu_vtt_icra_2020.pdf} } - C. Liu, Q. Lin, H. Kim, and M. Yim, “Parallel self-assembly with smores-ep, a modular robot,” in 2020 international conference on robotics and automation (icra), accepted, Paris, France, 2020.
[Bibtex]@INPROCEEDINGS{CL:QL:HK:MY:20, author={C. {Liu} and Q. {Lin} and H. {Kim} and M. {Yim}}, booktitle={2020 International Conference on Robotics and Automation (ICRA), accepted}, title={Parallel Self-Assembly with SMORES-EP, a Modular Robot}, year={2020}, pages={}, doi={}, ISSN={}, month={May}, address={Paris, France}, pdf={https://www.modlabupenn.org/wp-content/uploads/2022/03/liu_smores_assembly_2020.pdf} } - C. Liu and M. Yim, “A quadratic programming approach to modular robot control and motion planning,” in 2020 fourth ieee international conference on robotic computing (irc), Taichung, Taiwan, 2020, pp. 1-8.
[Bibtex]@INPROCEEDINGS{CL:MY:20, author = {C. {Liu} and M. {Yim}}, booktitle = {2020 Fourth IEEE International Conference on Robotic Computing (IRC)}, title = {A Quadratic Programming Approach to Modular Robot Control and Motion Planning}, year = {2020}, volume = {}, number = {}, pages = {1-8}, doi = {10.1109/IRC.2020.00008}, month = {Nov}, address = {Taichung, Taiwan}, pdf = {https://www.modlabupenn.org/wp-content/uploads/2021/07/Liu_irc_2020.pdf} } - C. Liu, A. Bera, T. Tsabedze, D. Edgar, and M. Yim, “Spiral zipper manipulator for aerial grasping and manipulation,” in 2019 ieee/rsj international conference on intelligent robots and systems (iros), Macau, China, 2019, pp. 3179-3184.
[Bibtex]@inproceedings{CL:AB:TT:DE:MY:19, title={Spiral Zipper Manipulator for Aerial Grasping and Manipulation}, author={Liu, Chao and Bera, Abhraneel and Tsabedze, Thulani and Edgar, Daniel and Yim, Mark}, booktitle={2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, address = {Macau, China}, year = {2019}, pages={3179-3184}, doi={10.1109/IROS40897.2019.8967982}, ISSN={2153-0858}, month={Nov.}, pdf={https://www.modlabupenn.org/wp-content/uploads/2020/02/chao_rcta_arm_2019.pdf} } - C. Liu and M. Yim, “Reconfiguration motion planning for variable topology truss,” in 2019 ieee/rsj international conference on intelligent robots and systems (iros), Macau, China, 2019, pp. 1941-1948.
[Bibtex]@inproceedings{CL:MY:vtt:19, title={Reconfiguration Motion Planning for Variable Topology Truss}, author={Liu, Chao and Yim, Mark}, booktitle={2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, address = {Macau, China}, year = {2019}, pages={1941-1948}, doi={10.1109/IROS40897.2019.8967640}, ISSN={2153-0858}, month={Nov.}, pdf={https://www.modlabupenn.org/wp-content/uploads/2020/05/chao_vtt_reconfiguration_2019.pdf} } - C. Liu, M. Whitzer, and M. Yim, “A distributed reconfiguration planning algorithm for modular robots,” Ieee robotics and automation letters, vol. 4, iss. 4, pp. 4231-4238, 2019.
[Bibtex]@Article{CL:MW:MY:19, title={A Distributed Reconfiguration Planning Algorithm for Modular Robots}, author={C. {Liu} and M. {Whitzer} and M. {Yim}}, journal={IEEE Robotics and Automation Letters}, year={2019}, volume={4}, number={4}, pages={4231-4238}, doi={10.1109/LRA.2019.2930432}, ISSN={2377-3766}, month={Oct}, pdf={https://www.modlabupenn.org/wp-content/uploads/2019/08/chao_smores_reconfiguration_2019.pdf} } - C. Liu, S. Yu, and M. Yim, “Shape morphing for variable topology truss,” in 2019 16th international conference on ubiquitous robots (ur), Jeju, Korea, 2019.
[Bibtex]@inproceedings{CL:SY:MY:ur:19, title={Shape Morphing for Variable Topology Truss}, author={C. {Liu} and S. {Yu} and M. {Yim}}, booktitle={2019 16th International Conference on Ubiquitous Robots (UR)}, address={Jeju, Korea}, pdf={https://www.modlabupenn.org/wp-content/uploads/2020/02/chao_vtt_ur_2019.pdf}, year={2019}, month={June} } - C. C. Kessens, M. Horowitz, C. Liu, J. Dotterweich, M. Yim, and H. L. Edge, “Toward lateral aerial grasping & manipulation using scalable suction,” in 2019 international conference on robotics and automation (icra), 2019, pp. 4181-4186.
[Bibtex]@inproceedings{CK:MH:CL:JD:MY:HE:19, title={Toward Lateral Aerial Grasping & Manipulation Using Scalable Suction}, author={Kessens, Chad C. and Horowitz, Matthew and Liu, Chao and Dotterweich, James and Yim, Mark and Edge, Harris L.}, booktitle={2019 International Conference on Robotics and Automation (ICRA)}, pages={4181-4186}, doi={10.1109/ICRA.2019.8793672}, ISSN={1050-4729}, month={May}, pdf={https://www.modlabupenn.org/wp-content/uploads/2020/05/rcta_gripper_2019.pdf}, year={2019} } - C. Liu and M. Yim, “Configuration recognition with distributed information for modular robots,” in Ifrr international symposium on robotics research, Puerto Varas, Chile, 2017.
[Bibtex]@inproceedings{CL:MY:17, title = {Configuration Recognition with Distributed Information for Modular Robots}, author = {Liu, Chao and Yim, Mark}, booktitle = {IFRR International Symposium on Robotics Research}, year = {2017}, month = {Dec}, address = {Puerto Varas, Chile}, doi = {10.1007/978-3-030-28619-4_65}, pdf={https://www.modlabupenn.org/wp-content/uploads/2020/05/chao_config_recognition_isrr2017.pdf} } - T. Tosun, D. Edgar, C. Liu, Tsabedze Thulani, and M. Yim, “Paintpots: low cost, accurate, highly customizable potentiometers for position sensing,” in Ieee international conference on robotics and automation, 2017.
[Bibtex]@InProceedings{TT:DE:CL:TT:MY:17, title = {PaintPots: Low Cost, Accurate, Highly Customizable Potentiometers for Position Sensing}, author = {Tosun, Tarik and Edgar, Daniel and Liu, Chao and Tsabedze, Thulani, and Yim, Mark}, booktitle = {IEEE International Conference on Robotics and Automation}, pdf={https://www.modlabupenn.org/wp-content/uploads/2017/10/tosun2017paintpots.pdf}, year = 2017 } - T. Tosun, J. Davey, C. Liu, and M. Yim, “Design and characterization of the ep-face,” in 2016 ieee/rsj international conference on intelligent robots and systems (iros), 2016.
[Bibtex]@inproceedings{TT:JD:CL:MY:16, title={Design and Characterization of the EP-Face}, author={Tosun, Tarik and Davey, Jay and Liu, Chao and Yim, Mark}, booktitle={2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, year={2016}, pdf={http://modlabupenn.org/wp-content/uploads/tosun2016epface.pdf} }
Projects
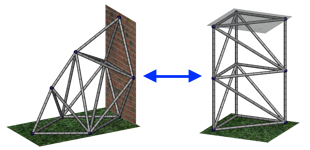
Motion Planning for Variable Topology Trusses: Reconfiguration and Locomotion
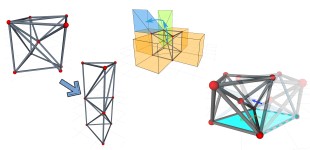
Truss robots are highly redundant parallel robotic systems that can be applied in a variety of scenarios. The variable topology truss (VTT) is a class of modular truss robots. As self-reconfigurable modular robots, a VTT is composed of many edge modules that can be rearranged into various structures depending on the task. These robots change …
Read more "Motion Planning for Variable Topology Trusses: Reconfiguration and Locomotion"
A Quadratic Programming Approach to Manipulation in Real Time

Manipulation tasks usually involve the control of redundant robots to reach large workspaces while avoiding obstacles and satisfying other constraints. This results in motion planning in high-dimensional space. In addition, whole-body manipulation tasks using multi-limbed robots may need the control of more than one manipulators. Modular robots can be used to construct many useful morphologies …
Read more "A Quadratic Programming Approach to Manipulation in Real Time"
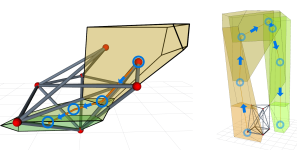
Motion Planning for Variable Topology Truss Modular Robot
Featured on Wevolver.com! Variable topology truss (VTT) is a self-reconfigurable modular truss robot. Similar to other types of truss robots, a VTT is composed of multiple members or edge modules which are the beam elements in the truss and nodes that are the connections among members, and can achieve high structural efficiency, change its shape …
Read more "Motion Planning for Variable Topology Truss Modular Robot"
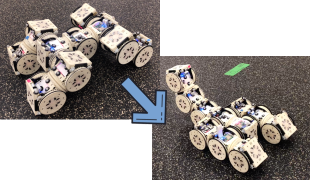
Parallel Self-assembly with SMORES-EP
It is common in nature that goups of individuals can form a variety of structures in order to overcome the limited capability of each individual, especially for insects who often need to collaborate in large groups to finish tasks. This collective intelligence is important to modular robots which are composed of numerous simple building blocks, …
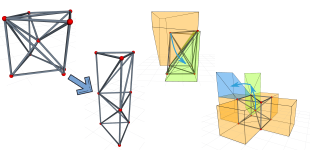
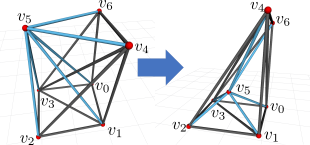
A Fast Configuration Space Algorithm for Variable Topology Truss Modular Robots
Variable topology truss (VTT) is a modular robotic system which is composed of multiple edge modules including a linear actuator as the truss member plus the two ends of the member that attach or detach from other ends to form the node. A VTT usually has at least 18 actuated degrees-of-freedom (DOFs) and typically more …
Read more "A Fast Configuration Space Algorithm for Variable Topology Truss Modular Robots"
Spiral Zipper Manipulator for Aerial Grasping and Manipulation
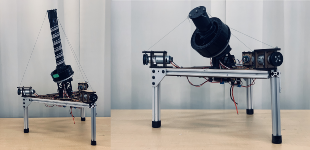
We present a novel manipulator for aerial vehicles to perform grasping and manipulation tasks. The goal is to design a low-cost, relatively light but strong manipulator with a large workspace and compact storage space that can be mounted on an unmanned aerial system. A novel design solution based on the Spiral Zipper, an expanding tube, …
Read more "Spiral Zipper Manipulator for Aerial Grasping and Manipulation"
Variable Topology Truss
Variable Topology Trusses (VTT) are a new class of self-reconfigurable robot. A VTT consists of linear actuators for the truss members, which are joined at the truss nodes by a special reconfigurable spherical joint. The VTT can reconfigure by merging and splitting these truss nodes. This page is the overall page for all VTT-related research. …
Reconfiguration Motion Planning for Variable Topology Truss
Finalist for Best Paper Award on Safety, Security, and Rescue Robotics in Memory of Motohiro Kisoi at IROS 2019 This work presents an algorithm to do motion planning for a new class of self-reconfigurable modular robot: the variable topology truss (VTT). Modular robots consist of many modules that can be configured into various structures, and …
Read more "Reconfiguration Motion Planning for Variable Topology Truss"
A Distributed Reconfiguration Planning for Modular Robots
Self-reconfigurable modular robots are usually composed of multiple modules with uniform docking interfaces that can be transformed into different configurations by themselves. The reconfiguration planning problem is finding what sequence of reconfiguration actions are required for one arrangement of modules to transform into another. We present a novel reconfiguration planning algorithm for modular robots. The …
Read more "A Distributed Reconfiguration Planning for Modular Robots"
Configuration Recognition with Distributed Information for Modular Robots
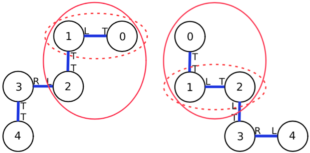
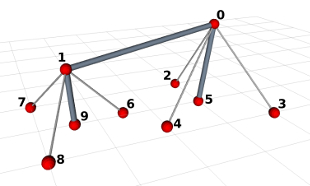
Modular robots are usually composed of multiple blocks with uniform docking interfaces that can be transformed into different configurations. It is a significant challenge to recognize modular robot configurations composed of hundreds of modules. Given a new configuration, it is important to match it to an existing configuration and, if true, map each module to …
Read more "Configuration Recognition with Distributed Information for Modular Robots"
Tether-Tube Robots
Tether-Tube Robot are a new type of parallel robots constructed from tethers and tubes. It is similar to cable robots but, rather than just using cables, expanding tubes are also used to do actuation. This design is achieved by utilizing a novel prismatic joint called Spiral Zipper developed in ModLab.
PaintPots
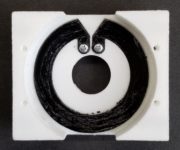
The PaintPot manufacturing process is a new way to create low-cost, low-profile, highly customizable potentiometers for position sensing in robotic applications. It uses widely accessible materials, requires no special expertise, and creates custom potentiometers in a variety of shapes and sizes, including curved surfaces.
The EP-Face Connector
We present the EP-Face connector, a novel connector for hybrid chain-lattice type modular robots that is high- strength (88.4N), compact, fast, power efficient, and robust to position errors.
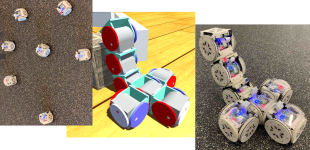
SMORES-EP

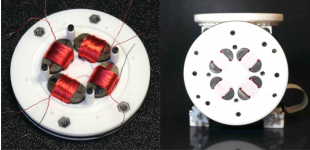
SMORES-EP is a modular robot designed and built at the University of Pennsylvania, and used by researchers at Penn and Cornell. SMORES stands for Self-Assembling MOdular Robot for Extreme Shapeshifting, and EP refers to the Electro-Permanent magnets the modules use to connect.
Low-cost Laser Range Finder

The goal for this project is to make a low-cost but high-speed , very small and reliable laser range finder. The idea is to talk to a small camera, and obtain the laser line position and send out the data line by line in real-time.
Persona
Our mobile telepresence robot is fitted with a robotic manipulator that will allow a person to virtually manipulate the avatar environment. We have shown our robot called "Persona" to be capable of moving up and down ramps, use elevators, manipulate objects such as chess pieces, and to lift and transport loads up to 4.5 kg.