Tether-Tube Robot are a new type of parallel robots constructed from tethers and tubes. It is similar to cable robots but, rather than just using cables, expanding tubes are also used to do actuation. This design is achieved by utilizing a novel prismatic joint called Spiral Zipper developed in ModLab.
Tether-Tube Robots Application and Hardware
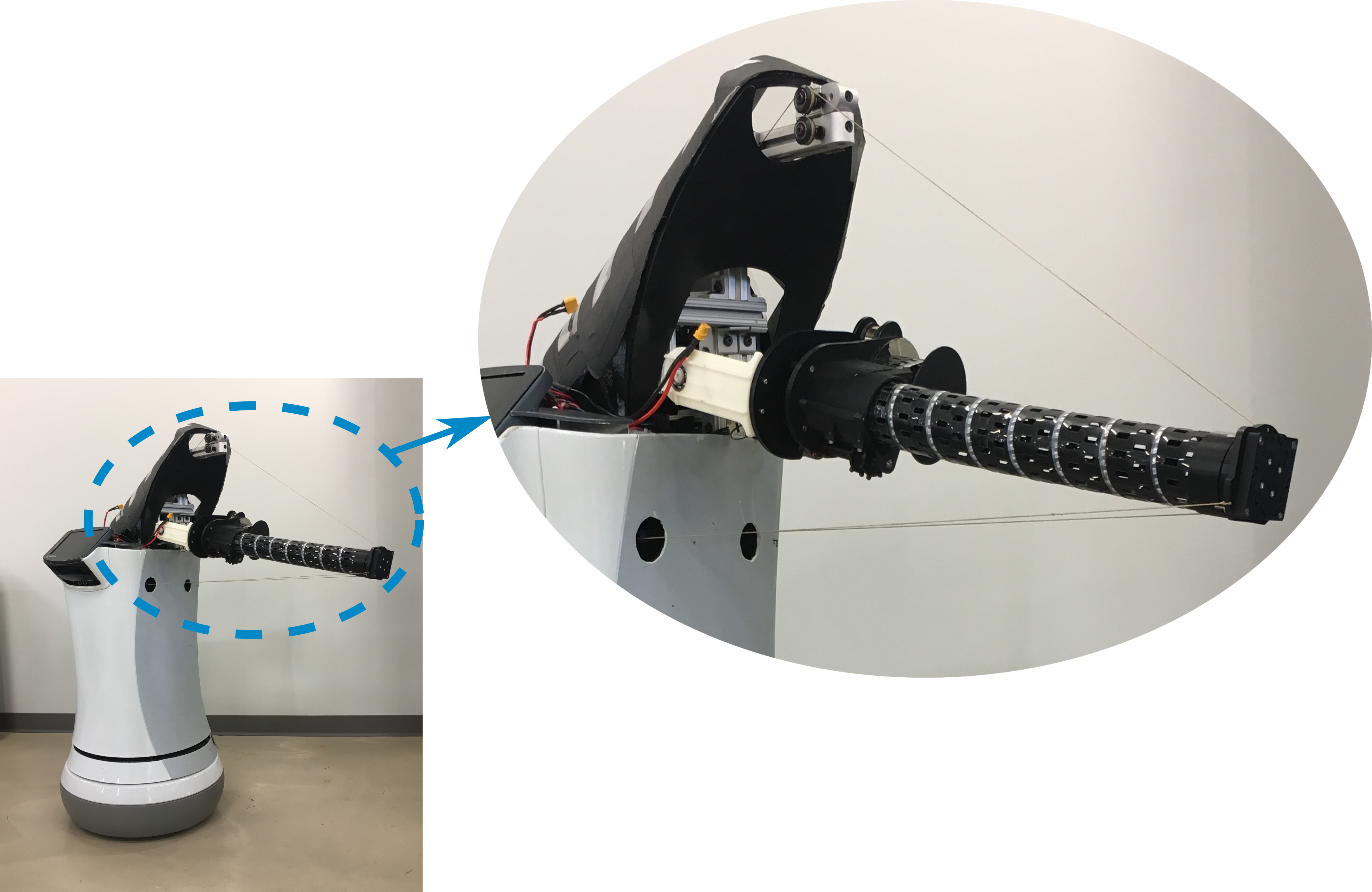
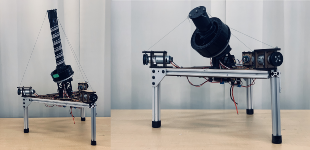
Tether-tube robots, comprised of multiple tethers and tubes, can be applied to a variety of hardware systems shown in the following figure. A robotic manipulator can be built with three tethers and one tube mounted on a mobile base (left figure). A VTT edge module is composed of a tube and two passive joints and multiple edges modules can construct a node by merging their joints.

Research Projects
Spiral Zipper Manipulator for Aerial Grasping and Manipulation
Proc. IROS 2019
We present a novel manipulator for aerial vehicles to perform grasping and manipulation tasks. The goal is to design a low-cost, relatively light but strong manipulator with a large workspace and compact storage space that can be mounted on an unmanned aerial system. A novel design solution based on the Spiral Zipper, an expanding tube, combined with tether actuators is presented.
Pingback:ร้านเค้กทุเรียนบางแค
Pingback:รับเช่าพระ
Pingback:รับซื้อ iPhone
Pingback:ฟิล์มกรองแสง
Pingback:คาเฟ่อารีย์
Pingback:ขายส่งยา
Pingback:Project Mancave
Pingback:ไก่ตัน
Pingback:กระเบื้องยาง SPC ราคา
Pingback:useless Tor sites
Pingback:eft time2win
Pingback:สั่งของจากจีน
Pingback:เรียนต่อออสเตรเลีย
Pingback:เครน แมงมุม
Pingback:eft hacks
Pingback:ซื้อทราย หาดใหญ่
Pingback:helpful hints
Pingback:luckyvip77
Pingback:รับทำ SEO
Pingback:som777
Pingback:เว็บรวมเกมสล็อต
Pingback:オンラインカジノ
Pingback:basics
Pingback:dultogel
Pingback:สล็อตเว็บใหญ่ เดิมพันเริ่มต้น 1 บาทลุ้นโบนัสไม่อั้น
Pingback:รับจัดงานศพ
Pingback:เน็ตบ้าน ais
Pingback:bangkok tattoo
Pingback:สกรีนแก้ว
Pingback:แทงบอลออนไลน์ 888
Pingback:ufabet777
Pingback:pgslot168
Pingback:hit789
Pingback:newspapper
Pingback:malabar magic mushroom
Pingback:ปริ้นแผ่นพับ
Pingback:สล็อตเกาหลี
Pingback:yabanc脹 dizi izle
Pingback:https://rickyonlinecasino.com/
Pingback:แทงหวย24
Pingback:นิยาย
Pingback:pgslot
Pingback:George
Pingback:ปั้มวิวไลฟ์สด
Pingback:ปั้มไลค์
Pingback:play Aviator in India