
Variable Topology Trusses (VTT) are a new class of self-reconfigurable robot. A VTT consists of linear actuators for the truss members, which are joined at the truss nodes by a special reconfigurable spherical joint. The VTT can reconfigure by merging and splitting these truss nodes.
This page is the overall page for all VTT-related research. ModLab has investigated several different aspects of this robot platform. Some work focuses on the hardware design of a robot prototype. Other work focuses on reconfiguration planning for VTT. Lastly, some work investigates locomotion strategies for particular truss topologies.
Here are some highlights:
- This article discusses the overall VTT concept, hardware, and some details about topological reconfiguration.
- This article is our most recent work on locomotion of an octahedral VTT.
- This article is our most recent work on reconfiguration planning and locomotion control for general VTTs.
A VTT demo was run at ICRA 2022 in Philadelphia, at both the GRASP Lab and the convention center exhibit hall. This paper was recently presented at ICRA.
Research Projects
Motion Planning for Variable Topology Trusses: Reconfiguration and Locomotion
Truss robots are highly redundant parallel robotic systems that can be applied in a variety of scenarios. The variable topology truss (VTT) is a class of modular truss robots. As self-reconfigurable modular robots, a VTT is composed of many edge modules that can be rearranged into various structures depending on the task. These robots change …
Read more "Motion Planning for Variable Topology Trusses: Reconfiguration and Locomotion"
A Linking Invariant for Truss Robot Motion Planning
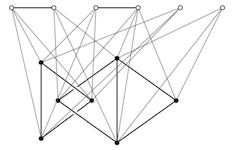
We introduce a new invariant for truss robot motion planning, called the link-augmented graph. This gives you a way to quickly tell if the start and goal configurations of a motion planning query might have a collision-free path between them.
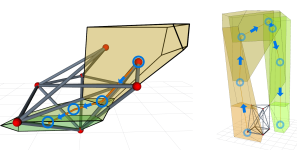
Polygon-based Random Tree Search Algorithm for a Size-Changing Robot
Fig. 1. Summary figure of the study: (a) The octahedron shape VTT; (b) Path planning through the narrow passage; (c) Locomotion simulation through the narrow passage. We proposed the Polygon-based Random Tree (PRT) search algorithm for path planning of the Variable Topology Truss (VTT) system [1]. PRT search algorithm finds the path to the goal …
Read more "Polygon-based Random Tree Search Algorithm for a Size-Changing Robot"
Reconfiguration Solution of a Variable Topology Truss: Design and Experiment
Fig. 1. Conceptual images of the VTT performing a search and rescue mission on a disaster site. (a) Locomotion; (b) arriving at the destination; (c) the master node grasping the target truss; (d) moving of the target truss; (e) finishing reconfiguration; (f) shoring up. VTT comprises “members,” and “nodes.” Nodes are located at the …
Read more "Reconfiguration Solution of a Variable Topology Truss: Design and Experiment"
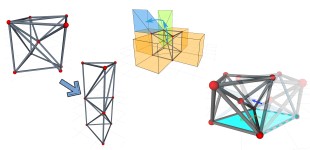
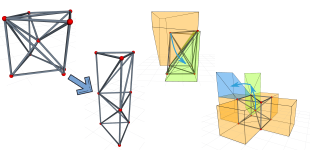
Topological Reconfiguration Planning for a Variable Topology Truss

Variable Topology Trusses (VTT) are a new class of self-reconfigurable robot. A VTT consists of linear actuators for the truss members, which are joined at the truss nodes by a special reconfigurable spherical joint. The VTT can reconfigure by merging and splitting these truss nodes. This article covers the contributions of our journal article about …
Read more "Topological Reconfiguration Planning for a Variable Topology Truss"
Polygon-based Random Tree Search Planning for Variable Geometry Truss Robot
Variable Topology Truss (VTT) is an improved Variable Geometry Truss that can change its topology. We designed the VTT as an octahedron shape by considering topology reconfiguration. The most important task of VTT is locomotion to a random goal position. Previously we used Rapid Random Tree (RRT) to find a trajectory of the center of …
Read more "Polygon-based Random Tree Search Planning for Variable Geometry Truss Robot"
Motion Planning for Variable Topology Truss Modular Robot
Featured on Wevolver.com! Variable topology truss (VTT) is a self-reconfigurable modular truss robot. Similar to other types of truss robots, a VTT is composed of multiple members or edge modules which are the beam elements in the truss and nodes that are the connections among members, and can achieve high structural efficiency, change its shape …
Read more "Motion Planning for Variable Topology Truss Modular Robot"
A Fast Configuration Space Algorithm for Variable Topology Truss Modular Robots
Variable topology truss (VTT) is a modular robotic system which is composed of multiple edge modules including a linear actuator as the truss member plus the two ends of the member that attach or detach from other ends to form the node. A VTT usually has at least 18 actuated degrees-of-freedom (DOFs) and typically more …
Read more "A Fast Configuration Space Algorithm for Variable Topology Truss Modular Robots"
Variable Topology Truss
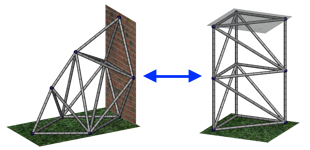
Variable Topology Trusses (VTT) are a new class of self-reconfigurable robot. A VTT consists of linear actuators for the truss members, which are joined at the truss nodes by a special reconfigurable spherical joint. The VTT can reconfigure by merging and splitting these truss nodes. This page is the overall page for all VTT-related research. …
Reconfiguration Motion Planning for Variable Topology Truss
Finalist for Best Paper Award on Safety, Security, and Rescue Robotics in Memory of Motohiro Kisoi at IROS 2019 This work presents an algorithm to do motion planning for a new class of self-reconfigurable modular robot: the variable topology truss (VTT). Modular robots consist of many modules that can be configured into various structures, and …
Read more "Reconfiguration Motion Planning for Variable Topology Truss"
Variable Topology Truss: Concept, Design and Analysis
Variable Topology Trusses (VTT) are a new class of self-reconfigurable robot. A VTT consists of linear actuators for the truss members, which are joined at the truss nodes by a special reconfigurable spherical joint. The VTT can reconfigure by merging and splitting these truss nodes.
Pingback:Topological Reconfiguration Planning for a Variable Topology Truss – ModLab – UPenn
Pingback:A Linking Invariant for Truss Robot Motion Planning – ModLab – UPenn
Pingback:Cornhole bags near me
Pingback:lights for cornhole boards
Pingback:Water Heater Installation Plumbers
Pingback:บอลยูโร 2024
Pingback:ทางเข้าเล่น jili slots
Pingback:Angthong National Marine Park
Pingback:sitecom
Pingback:5-MeO-DMT shop colorado Spring,
Pingback:ข่าวบอล
Pingback:ร้านดอกไม้อารีย์
Pingback:โปรแกรมโรงแรม
Pingback:หาฤกษ์ผ่าตัด
Pingback:รับจํานํารถ
Pingback:avsubthai
Pingback:อยากสมัครสมาชิกกับ LSM99 ต้องทำอย่างไร
Pingback:นักสืบเอกชน
Pingback:abacus link
Pingback:หัวมาโบ
Pingback:fox888
Pingback:เว็บตรงสล็อต
Pingback:jebjeed888
Pingback:video chat
Pingback:ทางเข้าpg
Pingback:ทำความรู้จักค่ายเกมส์ Evoplay
Pingback:ปั้มคนดูไลฟ์สด
Pingback:สล็อตเว็บตรง โบนัสแตกโหด
Pingback:ชุดยูนิฟอร์ม
Pingback:สล็อต888 เว็บตรง วอเลท
Pingback:Info
Pingback:slot99
Pingback:pk789
Pingback:Nonameauto
Pingback:จำนำไอโฟน
Pingback:massage Bangkok
Pingback:Sciences_2025
Pingback:ลำโพง TOA
Pingback:โอลี่แฟน
Pingback:ซักผ้าโรงแรม
Pingback:lazywin888
Pingback:สูตรหวยลาว ขั้นสูง แบบตีบวก
Pingback:ผู้ผลิต โบลเวอร์
Pingback:ปริ้นโบรชัวร์
Pingback:บทสรุป ทางเข้า Lotto
Pingback:http://aviatoroyini.com/az/
Pingback:บาคาร่า ufa11k
Pingback:2nd private university in diyala
Pingback:เว็บขายรหัสเกมส์
Pingback:รหัส valorant ราคาถูก
Pingback:BRC123 คาสิโน
Pingback:เว็บหวยออนไลน์ หวยเฮง789