Variable topology truss (VTT) is a self-reconfigurable modular truss robot. Similar to other types of truss robots, a VTT is composed of multiple members or edge modules which are the beam elements in the truss and nodes that are the connections among members, and can achieve high structural efficiency, change its shape by controlling the length of members, and perform locomotion on a variety of terrains. In addition, a VTT can also alter its topology — how members are connected — with the help of self-reconfigurable nodes. This enables a VTT to adapt to a wider range of environments and tasks by reconfiguring itself into multiple different morphologies. For example, the robot can initially be a cubic truss that is good at rolling locomotion and navigate into a building in a disaster scenario. Then it can reconfigure itself into a large support structure to reinforce the building to prevent further collapse. In order to achieve this goal, a fundamental problem to solve is the self-reconfiguration planning problem.
In a VTT, each edge module has an active prismatic joint member and passive joint ends that can actively attach or detach from other edge module ends. Thus, there are two types of reconfiguration motion: geometry reconfiguration and topology reconfiguration. Geometry reconfiguration involves moving positions of nodes by changing length of corresponding members and topology reconfiguration involves changing the connectivity among members. Reconfiguration planning is difficult due to a couple of reasons. A VTT has to be a rigid structure in order to maintain its shape and be statically determinant. A node in a VTT must be of degree of three, namely it has to be attached by at least three members. In addition, a VTT requires at least 18 members for topology reconfiguration. Thus, motion planning has to deal with at least 18 dimensions and typically more than 21 dimensions. Another challenge for motion planning is that motion of nodes are strongly coupled, namely moving one node can significantly affect the configuration space of other nodes. Furthermore, topology reconfiguration capability enables more possibilities of motions but also enlarges the search space and complicates the planning strategy.
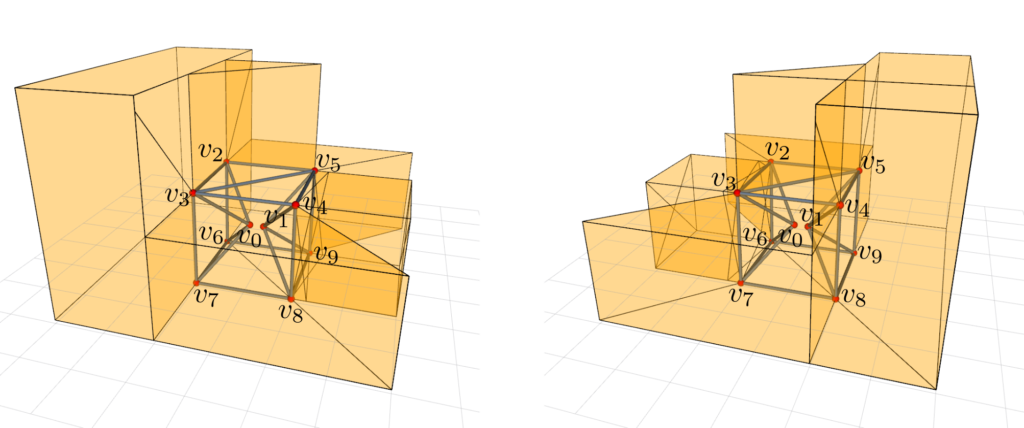
 with all members controlling
with all members controlling  ignored. Right: Group free space for with all members controlling ignored.
ignored. Right: Group free space for with all members controlling ignored.In our previous work, we presented a fast algorithm to analyze and compute the configuration space for a single node in a VTT, including its obstacle region and free space. We extend this work to compute the configuration space for a group of nodes. We constrain the motion of the group of nodes inside their group free space respectively, and apply RRT motion planner to generate valid paths for them at the same time. All samples are generated inside these group free space and we only need to consider collision among a small set of edge modules. In this way, we can do motion planning for a group of nodes efficiently. In order to change the overall shape of a VTT, multiple nodes may be involved, and we can divide these nodes into multiple groups with size of either one node or a pair of nodes, then do planning group by group.
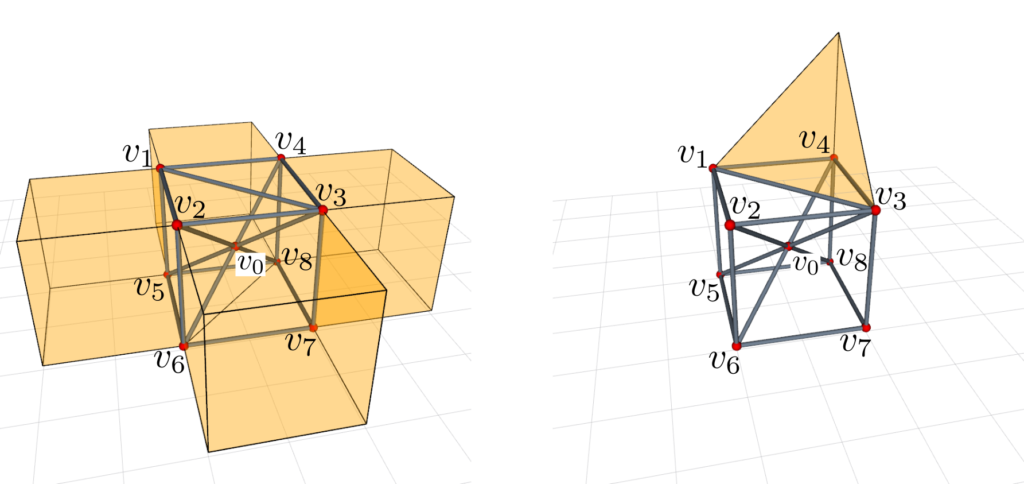
 contains the current position of . Right: Another enclosed subspace of that is separated from by obstacles.
contains the current position of . Right: Another enclosed subspace of that is separated from by obstacles.
Free space of a node in a VTT is usually not a single connected space, and if a motion task has initial and goal configurations in separated enclosed subspaces, topology reconfiguration is needed. There are two atomic actions: Split and Merge. If a node is controlled by more than 6 members, it can be split into two separated nodes, and these two nodes can go around some obstacle region and merge back into a single node in another enclosed subspace. We present an algorithm to search all enclosed subspaces quickly as well as a graph search algorithm to explore these enclosed subspaces and generate a sequence of topology actions for a given motion task.
We tested our framework with some scenarios which are shown in the video. The dramatic change of the overall shape of a VTT can be achieved efficiently using our planning framework. The detailed data can be found in our paper. The framework is implemented in C++ and incorporated with ROS and the software can be found here.
Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png)
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) C. Liu, S. Yu, and M. Yim, “Motion planning for variable topology truss modular robot,” in Proceedings of robotics: science and systems, 2020.
C. Liu, S. Yu, and M. Yim, “Motion planning for variable topology truss modular robot,” in Proceedings of robotics: science and systems, 2020.
[Bibtex]@inproceedings{CL:SY:MY:20, title = {Motion Planning for Variable Topology Truss Modular Robot}, author = {Liu, Chao and Yu, Sencheng and Yim, Mark}, booktitle = {Proceedings of Robotics: Science and Systems}, year = {2020}, MONTH = {July}, pdf = {https://www.modlabupenn.org/wp-content/uploads/2020/11/liu_vtt_rss_2020.pdf}, doi = {10.15607/RSS.2020.XVI.052} }
Pingback:ModLab UPenn » Archive » Variable Topology Truss
Pingback:Variable Topology Truss – ModLab – UPenn
Pingback:relaxing jazz instrumental
Pingback:bossa nova jazz
Pingback:ทำความรู้จัก GAMING WORLD
Pingback:sa game login
Pingback:Gambit777 เว็บสล็อตออนไลน์ทุกการเดิมพัน รับ 1 point
Pingback:grayzone cheat
Pingback:เว็บพนันเกาหลี
Pingback:bobs-seo.com/las-vegas/
Pingback:เว็บเจ้ามือ
Pingback:เช่าจอLED
Pingback:Medical
Pingback:รวมเกมไพ่ออนไลน์ทุกรูปแบบ ทุนน้อยก็เล่นได้
Pingback:Herbalife discounts
Pingback:sistem recuperare caldura
Pingback:สอนภาษาไทยให้ชาวต่างชาติ
Pingback:ADVANTPLAY
Pingback:h07vvh6-f
Pingback:สล็อตเว็บตรง ค่ายเกมPG
Pingback:สล็อตออนไลน์ เว็บตรงไม่ผ่านเอเย่นต์
Pingback:เสื้อช็อป
Pingback:หวยออมสิน
Pingback:Доставка авто з Європи
Pingback:lottorich28
Pingback:lazywin888
Pingback:โคมโรงงาน
Pingback:KC9 สล็อต เว็บตรงไม่ผ่านเอเย่นต์
Pingback:highbay
Pingback:pirkt mežu
Pingback:โคมไฟ
Pingback:เว็บพนันออนไลน์เกาหลี
Pingback:Book Thailand Bus
Pingback:Sciences_2025
Pingback:kc9
Pingback:drain cleaning dallas
Pingback:บริการนิติบุคคล
Pingback:รับติดตั้งระบบระบายอากาศ
Pingback:Mostbet
Pingback:สล็อตเว็บตรง pg slot
Pingback:พิมพ์ใบปลิว
Pingback:เว็บสล็อตที่คนไทยเล่น อันดับ 1 LSM99 ของแทร่
Pingback:Dragon Hatch 2
Pingback:นวดหน้ายกกระชับ
Pingback:Win real money now