Manipulation tasks usually involve the control of redundant robots to reach large workspaces while avoiding obstacles and satisfying other constraints. This results in motion planning in high-dimensional space. In addition, whole-body manipulation tasks using multi-limbed robots may need the control of more than one manipulators. Modular robots can be used to construct many useful morphologies with multiple chains for manipulation tasks. Multiple chains can behave as a gripper to grasp some objects although their geometry shapes can be very simple. A significant feature for these morphologies built by many modules is that the motion of chains are usually strongly coupled, namely these chains usually share many degrees of freedom. Also a general modeling solution is necessary since the a set of modules can form a large number of morphologies. We present a real-time planner to handle manipulation planning tasks including a kinematics modeling solution for arbitrary morphologies, a real-time controller to handle multiple motion tasks even if they are coupled, and a novel obstacle avoidance strategy based on a obstacle approximation method. This planner is demonstrated on real modular robots.
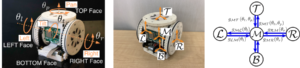
In a modular robotic system, a module can be modeled as a graph with all kinematics information embedded. For example, a SMORES-EP module is shown below that has four degrees of freedom and four connectors. A module graph can be generated to describe the kinematics model of this module where each vertex is a rigid body in the module (a connector or the module body) and each edge represents how adjacent rigid bodies are connected. A morphology is constructed by several modules and we can obtain the kinematics graph for a given morphology by composing the module graphs through connecting connector vertices. Then a kinematic chain from one frame to another frame is simply derived by following the shortest path between these two frames and a kinematics model for this chain can also be generated easily. More details can be found in the referenced papers.
Given a kinematic chain and a control task, a position control law can be built. It is shown that when there are multiple control tasks, e.g. moving multiple rigid bodies at the same time, we can simply stack the control law for each task even if some motion tasks are coupled, namely some kinematic chains can share some degrees of freedom. For a redundant robotic system, this control problem can be formulated as a quadratic program in which the control laws for all motion tasks are linear constraints. The hardware constraints, including position and velocity limits, can also be added as inequality constraints. A hardware demonstration is shown using CKBot modules.
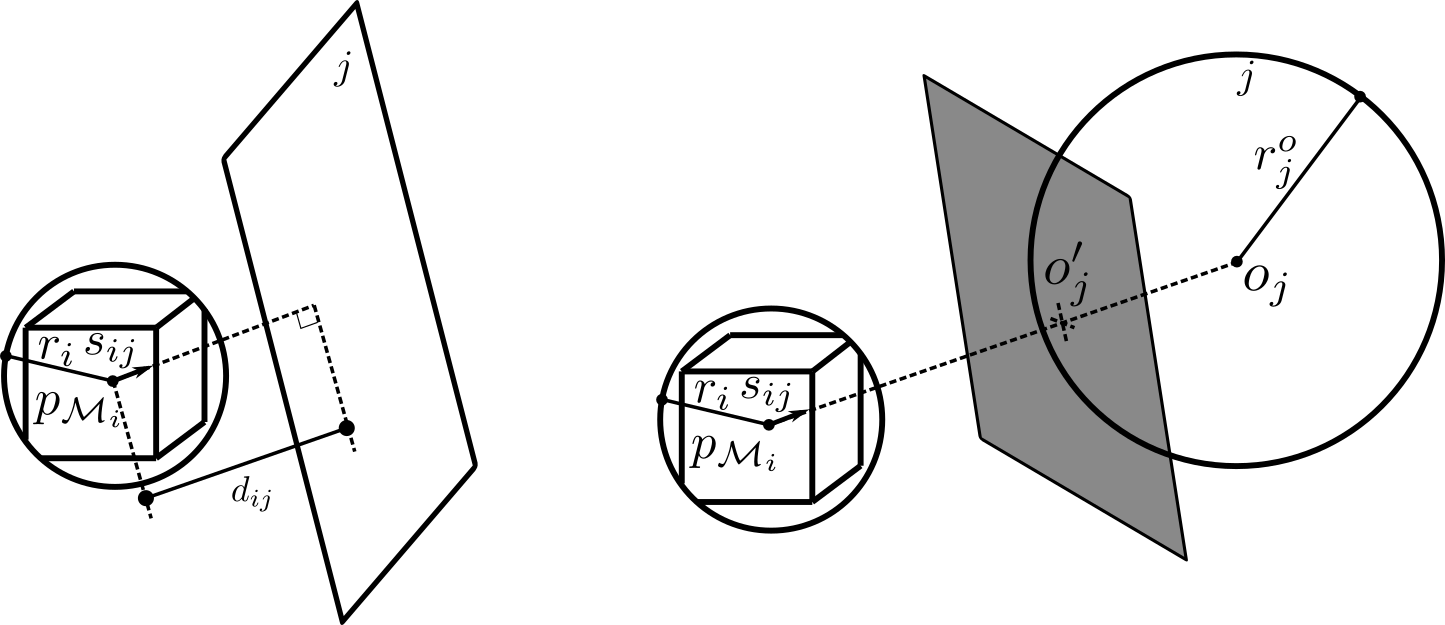
During the task, modules cannot move beyond the workspace boundary and collide with any environment obstacles. Modules are usually in regular shapes, such as spheres or cubes, and we use a sphere to approximate the geometry size of a module. The workspace can be defined as a polyhedron and for each facet of the polyhedron, a linear constraint can be built to keep the module from traversing the boundary. Obstacles can be approximated by a sphere-tree construction algorithm and we can form a virtual plane between the module and every obstacle sphere so that a similar linear constraint can be built to avoid collision. There can be a very large number of obstacle spheres and the constrained manifold makes the optimization problem difficult to solve. However, these obstacle spheres can be pruned significantly as we build these virtual planes, and this process can be executed efficiently by iteratively applying an erase-remove idiom technique for real-time applications.
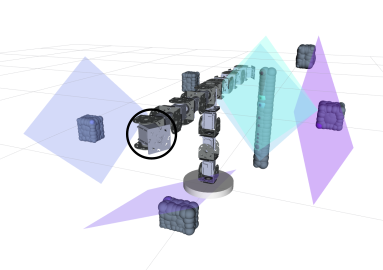
The control and motion planning task can be formulated as a sequential optimization process. The control law is embedded as a term in the objective function. In the process, if any module is close to some obstacle sphere, we add a term to the objective function to penalize the motion of this module towards to that obstacle. If any module makes contact with some obstacle sphere, this module will be forced to move away by defining a repulsive velocity as the normal to the corresponding obstacle virtual plane that can be done by adding a hard inequality constraint and remove the previously added penalizing term for this module from the objective function. Several experiments are shown in the following video.
Publications
Note: The Obstacle Avoidance model in the published IRC paper from IEEE Xplore is not correct, and the correction is shown in the following provided PDF file.
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png)
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) C. Liu and M. Yim, “A quadratic programming approach to modular robot control and motion planning,” in 2020 fourth ieee international conference on robotic computing (irc), Taichung, Taiwan, 2020, pp. 1-8.
C. Liu and M. Yim, “A quadratic programming approach to modular robot control and motion planning,” in 2020 fourth ieee international conference on robotic computing (irc), Taichung, Taiwan, 2020, pp. 1-8.
[Bibtex]@INPROCEEDINGS{CL:MY:20, author = {C. {Liu} and M. {Yim}}, booktitle = {2020 Fourth IEEE International Conference on Robotic Computing (IRC)}, title = {A Quadratic Programming Approach to Modular Robot Control and Motion Planning}, year = {2020}, volume = {}, number = {}, pages = {1-8}, doi = {10.1109/IRC.2020.00008}, month = {Nov}, address = {Taichung, Taiwan}, pdf = {https://www.modlabupenn.org/wp-content/uploads/2021/07/Liu_irc_2020.pdf} }
- C. Liu and M. Yim, “A quadratic programming approach to manipulation in real-time using modular robots,” The international journal of robotic computing (invited), vol. 3, iss. 1, pp. 121-145, 2021.
[Bibtex]@ARTICLE{CL:MY:21, author = {Chao {Liu} and Mark {Yim}}, journal = {The International Journal of Robotic Computing (Invited)}, title = {A Quadratic Programming Approach to Manipulation in Real-Time Using Modular Robots}, year = 2021, volume = 3, number = 1, pages = {121-145}, doi = {10.35708/RC1870-126268}, pdf = {https://www.modlabupenn.org/wp-content/uploads/2021/08/Liu_ijrc_2021.pdf} }
Pingback:ModLab UPenn » Archive » CKbot
Pingback:seo keyword planner tool
Pingback:สล็อตวอเลท ไม่มีขั้นต่ำ
Pingback:buy weed online
Pingback:ป้ายโฆษณา
Pingback:ALLBET ค่ายคาสิโน บาคาร่า
Pingback:buy dmt carts
Pingback:alpha88 pc
Pingback:ทินเนอร์คุณภาพสูง
Pingback:20175 Homes for Sale
Pingback:rajadamnern boxing stadium
Pingback:muay thai bangkok
Pingback:patong boxing stadium
Pingback:สล็อต pg เว็บตรง แตกหนัก
Pingback:agen slot
Pingback:betmw168
Pingback:Hunter898
Pingback:luxury pool villas in phuket
Pingback:nagaqq poker
Pingback:yehyeh
Pingback:เพิ่มยอดไลค์
Pingback:situs togel
Pingback:buy psilocybin mushrooms united states
Pingback:Vape carts for sale
Pingback:muha meds carts
Pingback:mejaqq
Pingback:สายใยลวด
Pingback:เสาเข็มไมโครไพล์
Pingback:https://ccaps.net/
Pingback:bonanza178
Pingback:boom mushroom bars
Pingback:สล็อตเว็บตรงไม่ผ่านเอเย่นต์
Pingback:VMC
Pingback:Juesใช้แล้วทิ้ง
Pingback:Seoul Pod Infinity
Pingback:Relx Pod
Pingback:super kaya88
Pingback:xm ดีไหม
Pingback:Native Smokes
Pingback:ทำความรู้จัก หุ้นดาวโจนส์
Pingback:yehyeh.com
Pingback:Smooth Jazz Music
Pingback:super kaya88
Pingback:ป้ายกรุงเทพ
Pingback:ป้ายโฆษณารถยนต์
Pingback:CKbot – ModLab – UPenn
Pingback:cafe instrumental music
Pingback:deep sleeping
Pingback:sleeping music
Pingback:relaxing
Pingback:relaxing music
Pingback:peaceful music
Pingback:relax
Pingback:cozy beach cafe
Pingback:bossa nova jazz
Pingback:coffee shop jazz
Pingback:winter jazz romance
Pingback:relaxing piano music
Pingback:963 hz
Pingback:sleep music
Pingback:calming music
Pingback:música para treinar
Pingback:nature sounds
Pingback:exquisite jazz
Pingback:winter jazz
Pingback:calm music
Pingback:background music
Pingback:soothing piano music
Pingback:hip hop
Pingback:Study Music
Pingback:jazz cafe
Pingback:meditation music
Pingback:relax music
Pingback:bossa nova music
Pingback:relaxation and renewal
Pingback:water sounds
Pingback:Autumn Morning
Pingback:mafia rap 2022
Pingback:relaxing sleep music
Pingback:soothing relaxation
Pingback:jazz coffee
Pingback:piano relaxing music
Pingback:stress relief
Pingback:jazz relax
Pingback:jazz instrumental
Pingback:jazz and snow
Pingback:cozy
Pingback:trap japanese
Pingback:bird chirping
Pingback:harp background music
Pingback:jazz piano music
Pingback:relaxing jazz instrumental
Pingback:motivation music workout
Pingback:motivational songs
Pingback:coffee shop
Pingback:heavenly music
Pingback:piano jazz instrumental
Pingback:jazz bossa
Pingback:trap workout motivation
Pingback:zen music 24/7
Pingback:relaxing jazz music
Pingback:jazz music
Pingback:sleep meditation
Pingback:bamboo water fountain
Pingback:calm jazz music
Pingback:gangster rap 2023
Pingback:christmas jazz fireplace
Pingback:hiphop
Pingback:bgm
Pingback:trap mix 2023
Pingback:gym
Pingback:christmas jazz instrumental
Pingback:ethereal jazz music
Pingback:peaceful piano music
Pingback:jazz music meaning
Pingback:joyful jazz
Pingback:coffee music
Pingback:healing music
Pingback:Relaxing Jazz
Pingback:musicas de academia
Pingback:smooth jazz
Pingback:yoga music
Pingback:spa music
Pingback:relaxing piano jazz
Pingback:piano music
Pingback:jazz cabin ambience
Pingback:smooth night jazz
Pingback:rainy jazz
Pingback:warm jazz
Pingback:instrumental music relaxing
Pingback:relaxing slow christmas jazz music
Pingback:rainy night
Pingback:soothing music
Pingback:piano
Pingback:jazz for happy xmas day
Pingback:lofi hip hop mix
Pingback:soothing piano
Pingback:calm melody
Pingback:healing meditation
Pingback:musica de treino
Pingback:coffee shop music
Pingback:night jazz
Pingback:music for stress relief
Pingback:cozy jazz
Pingback:piano jazz instrumental music
Pingback:smooth jazz instrumental
Pingback:relax everyday
Pingback:type beat japanese
Pingback:jazz relaxing music
Pingback:smooth piano jazz instrumental music
Pingback:trap bass japanese
Pingback:piano jazz
Pingback:best of jazz
Pingback:coffee shop ambience
Pingback:coffee relaxing jazz
Pingback:jazz
Pingback:jazz bossa nova
Pingback:relaxing bossa nova
Pingback:relaxing outdoor coffee shop
Pingback:bossa nova cafe jazz
Pingback:outdoor coffee
Pingback:positive morning
Pingback:bossa nova cafe
Pingback:relaxing spring jazz
Pingback:smooth bossa nova jazz
Pingback:jazz for work
Pingback:bossa jazz cafe
Pingback:relax cafe music