Variable Topology Trusses (VTT) are a new class of self-reconfigurable robot. A VTT consists of linear actuators for the truss members, which are joined at the truss nodes by a special reconfigurable spherical joint. The VTT can reconfigure by merging and splitting these truss nodes.
This article covers the contributions of our journal article about VTT in ASME JMR Aug 2021, which is an extended version of the original paper presented at IROS 2017. Hence, this article is an updated version of our previous article.
A Variable Topology Truss extends the class of variable geometry truss robots by allowing them to rearrange the way their truss members are connected to each other. This increases the versatility of the robot; it can adapt its topology to match the required task. For example, we envision a VTT system used in a disaster response scenario. First, the VTT would be transported to the disaster site in a compact storage configuration. The VTT would reconfigure into a walking or rolling topology and move into a collapsing building. Then, the VTT would reconfigure into a shoring structure to support the building, preventing further collapse while first responders search for survivors. Once the search is complete, the VTT could extract itself and move on to the next building.
Two key technologies that enable VTT are the spiral zipper linear actuator and the reconfigurable VTT joint. In the journal article, we present a new version of the VTT joint that enables the reconfiguration capability. It uses a 12-bar planar linkage to achieve a large maximum angle and has a new latching system with an increased area of acceptance. We use this design to demonstrate the merge-and-split capabilities that allow topological reconfiguration.

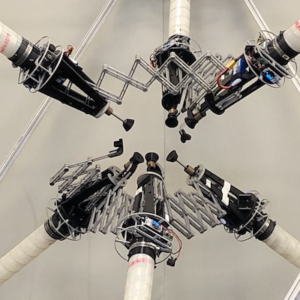
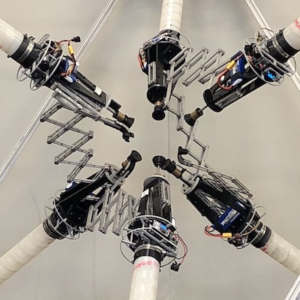

The above images show a demonstration of merge-and-split reconfiguration. We start with an octahedron with two internal nodes. The internal nodes move to have a coincident virtual center and undock their joint chains. Then, the joints rearrange their connections to form two different nodes. Finally, the two new nodes move apart to show that the truss connectivity has changed. In a truss with more members, this process could be repeated several times to greatly change the truss topology.
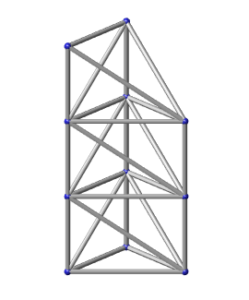
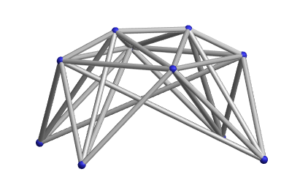
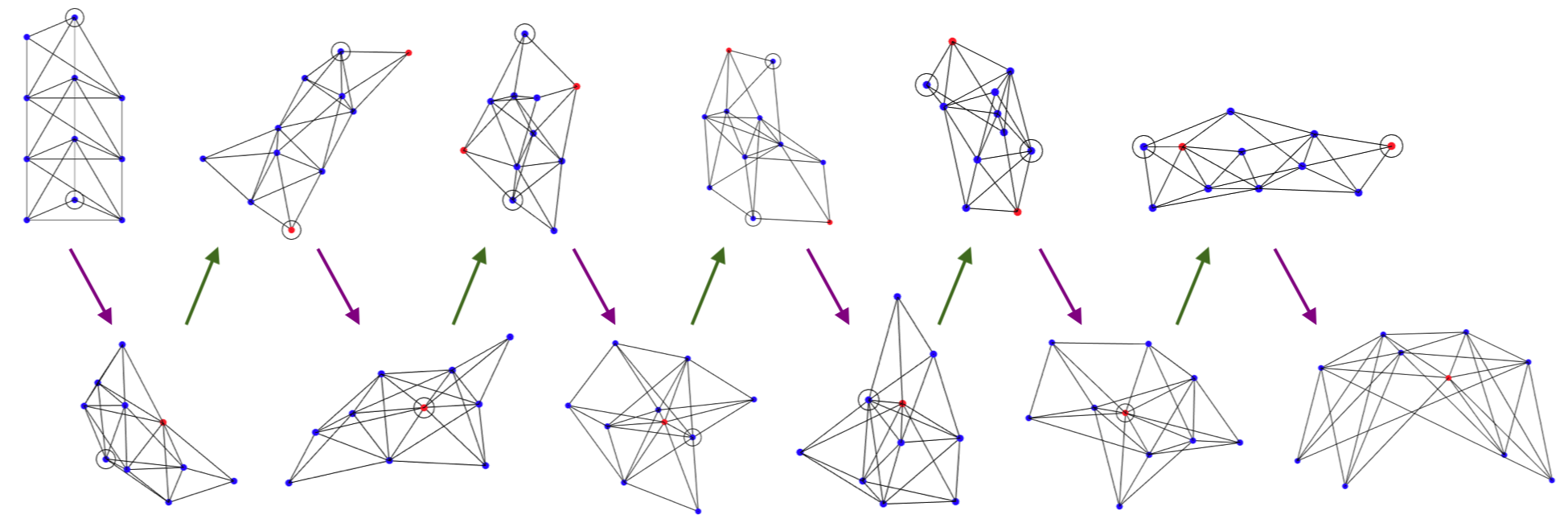
In the journal article, we investigate the capabilities of this reconfiguration action in greater detail. Given a truss topology, we can enumerate all of the possible reconfiguration actions. From this, we can iterate through truss topologies and build a network that describes which topologies are reachable through this reconfiguration mechanism. For example, we can show that it is possible to transform from the tower topology pictured above to the dome topology through a sequence of no fewer than 11 merges and splits.
The merge-and-split mechanism requires at least 18 members to achieve meaningful topological reconfiguration. So far, we have characterized the reconfiguration capabilities for all VTTs with fewer than 30 members, which encompasses more than 80 million truss topologies.
Pingback:Variable Topology Truss – ModLab – UPenn
Pingback:water sounds
Pingback:rap music
Pingback:fireplace jazz
Pingback:evaporator
Pingback:ks quik 2000
Pingback:PEP
Pingback:BIPOC
Pingback:เทรดทอง
Pingback:kayak
Pingback:ลวดสลิง
Pingback:shower room bangkok
Pingback:office for rent phuket
Pingback:68kub
Pingback:Winchester firearms for sale
Pingback:crescent 9 seltzer
Pingback:APEX cheat
Pingback:buy 6 apb powder
Pingback:เว็บพนันเกาหลี
Pingback:พรมปูพื้นรถยนต์
Pingback:รักษาสิว
Pingback:รถรับส่งสนามบินในญี่ปุ่น
Pingback:jaxx download
Pingback:nustep t4r used for sale
Pingback:เว็บตรงสล็อต
Pingback:pink lost mary vape
Pingback:จดทะเบียนบริษัท
Pingback:เค้กด่วน
Pingback:บาคาร่า all
Pingback:เดิมพันอีสปอร์ต Ku eSports
Pingback:ฝักบัวอาบน้ำ
Pingback:แทงบอลออนไลน์เกาหลี
Pingback:Al Yarmouk University College
Pingback:Angthong National Marine Park
Pingback:Diaphragm Husky
Pingback:https://www.mfsvizedanismanlik.com.tr/pocket-option-fees-obzor-komissii-i-sborov/
Pingback:slot99
Pingback:hit789
Pingback:website
Pingback:big bass splash
Pingback:ของพรีเมี่ยม
Pingback:keyboard for gaming
Pingback:face exercise
Pingback:อุปกรณ์กายภาพบำบัด
Pingback:gubet
Pingback:บาคาร่า ufa11k
Pingback:doxycycline monohydrate
Pingback:tetracycline antibiotics price
Pingback:prevacid 15 mg
Pingback:fluconazole 100 mg tablet for oral thrush
Pingback:zoloft for sale
Pingback:sertraline hcl
Pingback:lasix for dogs cost
Pingback:lasix water pill 20 mg
Pingback:dexlansoprazole generico
Pingback:pantoprazole sodium tab 40mg
Pingback:nexium over the counter uk
Pingback:rogaine shampoo for hair loss
Pingback:viagra pill image
Pingback:cialis online generic
Pingback:vardenafil alternative
Pingback:zantac and allergies
Pingback:finasteride 5mg pill
Pingback:orlistat consumo
Pingback:wegovy semaglutid mounjaro tirzepatid
Pingback:semaglutid tablete cijena zagreb
Pingback:what is proscar used for
Pingback:doxycycline good for skin infections
Pingback:doxycycline price at walmart
Pingback:can you take sildenafil daily
Pingback:tablet acyclovir 800 mg uses
Pingback:terbinafine dosage page
Pingback:ketoconazole shampoo for hair loss
Pingback:terbinafine side effects guide
Pingback:ketoconazole medical uses
Pingback:ketorolac tromethamine
Pingback:minoxidil clarification faq