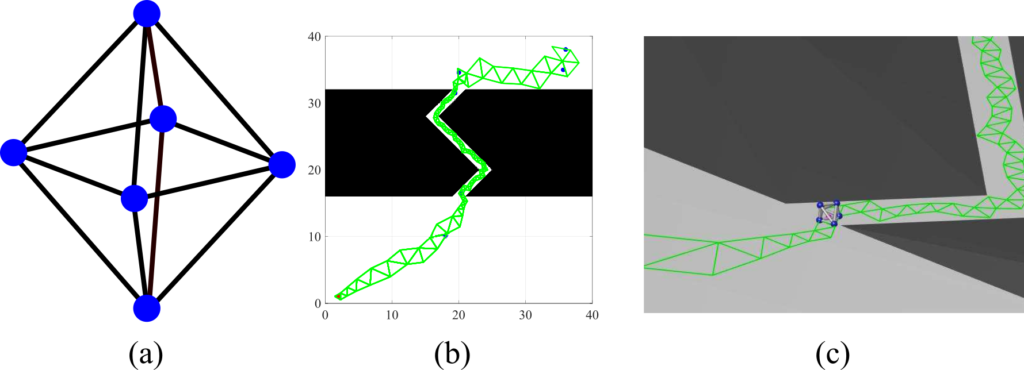
Fig. 1. Summary figure of the study: (a) The octahedron shape VTT; (b) Path planning through the narrow passage; (c) Locomotion simulation through the narrow passage.
We proposed the Polygon-based Random Tree (PRT) search algorithm for path planning of the Variable Topology Truss (VTT) system [1]. PRT search algorithm finds the path to the goal by generating the series of support polygons. In the previous study, we constrained the size of the support polygon within a certain range. However, VTT can change its volume a lot by using spiral zipper actuators. By using this feature, VTT can squeeze into a narrow area by reducing its size, and take a large step to increase efficiency in a wide area by increasing its size. This study introduces the Polygon-based Random Tree search algorithm with varying support polygon sizes (PRT-V). Fig. 1 summarizes the PRT-V algorithm.
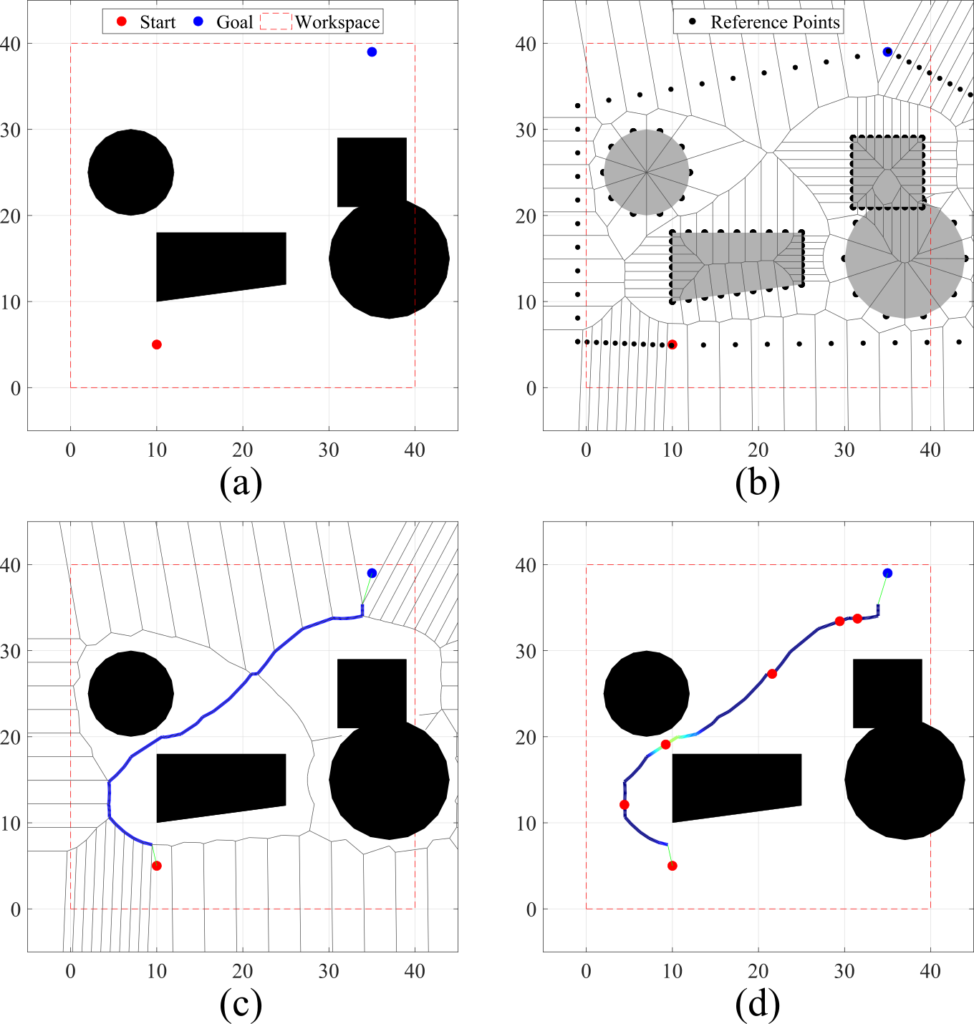
Fig. 2. Process of analyzing a workspace: (a) Given workspace; (b) A Voronoi diagram is generated; (c) The rough trajectory to the goal is generated by finding the shortest path on Voronoi diagram. (d) Stopover points are selected based on the minimum distance from obstacles.
The algorithm finds stopover points and determines the desired size of the support polygon at the point. To find proper stopover points, we used a Voronoi diagram to figure out where is the important points. A Voronoi diagram is used for generating a rough trajectory from the initial point to the goal point. Stopover points are determined from bottleneck points along the Voronoi path. The selection criteria find local minima or maxima based on the distance to obstacles. Fig. 2 shows the stopover point determination process by using the Voronoi diagram. The stopover points are denoted as red dots.
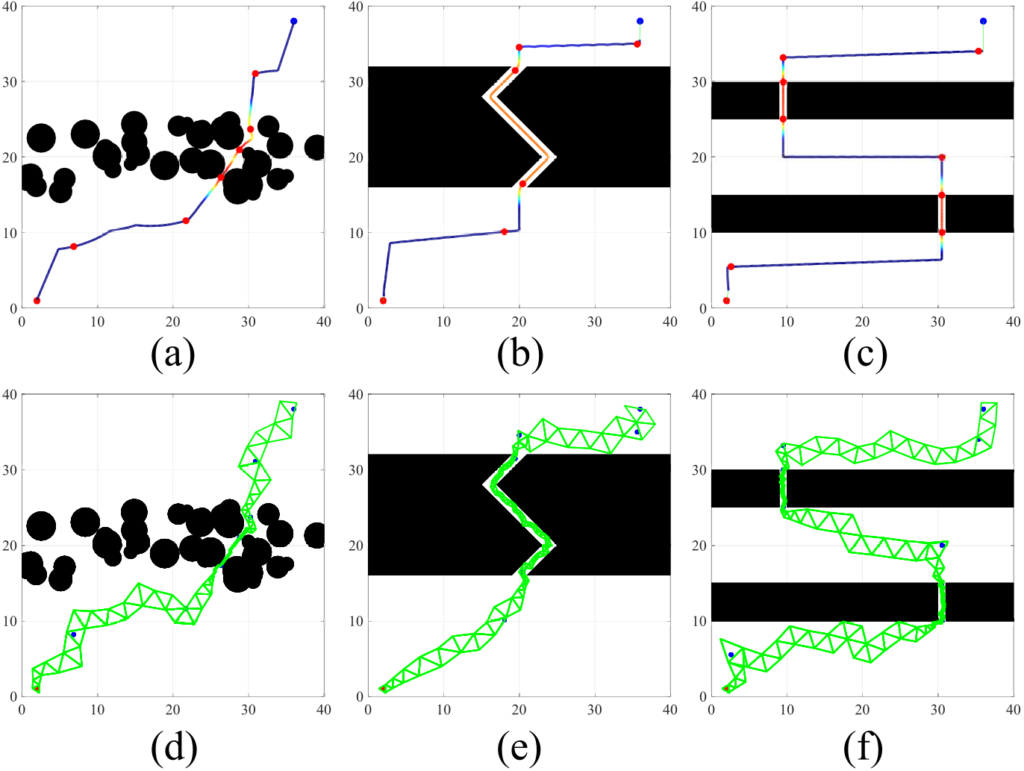 Fig. 3. Path planning simulation. For workspace 1: (a) Voronoi path and stopover points; (d) Desired support polygons. For workspace 2: (b) Voronoi path and stopover points; (e) Desired support polygons. For workspace 3: (c) Voronoi path and stopover points; (f) Desired support polygons.
Fig. 3. Path planning simulation. For workspace 1: (a) Voronoi path and stopover points; (d) Desired support polygons. For workspace 2: (b) Voronoi path and stopover points; (e) Desired support polygons. For workspace 3: (c) Voronoi path and stopover points; (f) Desired support polygons.
We applied the PRT algorithm to generate the support polygon trajectories between stopover points. Instead of maintaining the support size, we revised the algorithm to slowly change the size of the support polygons step by step to reach the required size at the next stopover point. To figure out the performance of the PRT-V algorithm, we conducted path planning simulations in three workspaces: Workspace 1 with 40 randomly generated circular obstacles; Workspace 2 with a zigzag-shaped narrow passage; Workspace 3 with two separate narrow passages. The path planning simulation results are presented in Fig. 3. The PRT-V algorithm could successfully generate support polygon paths in three workspaces. Using the non-impact rolling locomotion as we did in the previous study [2], we conducted locomotion simulation through the generated support polygon trajectory. The simulation was successful and the snapshots of the simulation in workspace 2 were presented in Fig. 4.
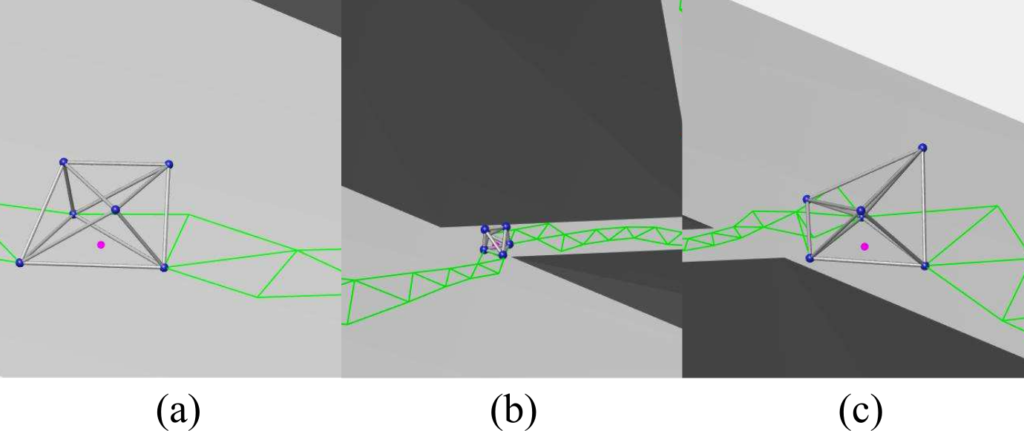
Fig. 4. Snapshots from locomotion simulation through the narrow passage: (a) Moving in a large space; (b) Retracting size to go into a narrow passage; (c) Increasing size again after the passage.
[1] S. Park, J. Bae, S. Lee, M. Yim, J. Kim, and T. Seo, “Polygon-based random tree search planning for variable geometry truss robot,” IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 813–819, 2020.
[2] S. Park, E. Park, M. Yim, J. Kim, and T. Seo, “Optimization-based nonimpact rolling locomotion of a variable geometry truss,” IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 747–752, 2019.
Pingback:Variable Topology Truss – ModLab – UPenn
Pingback:relaxing music
Pingback:deep sleep
Pingback:bird chirping
Pingback:relaxing outdoor coffee
Pingback:undress ai free tools
Pingback:slot
Pingback:สำนักงานตัวแทน AIA ราชบุรี
Pingback:รับทำ SEO
Pingback:ks quik 2000
Pingback:สั่งเค้ก
Pingback:เรียนต่อจีน
Pingback:เช่ารถ alphard
Pingback:fake advertising
Pingback:สั่งสินค้าจากจีน
Pingback:ประวัติ ค่ายพนัน muaypakyok
Pingback:ผู้ป่วยติดเตียง
Pingback:บาคาร่าเกาหลี
Pingback:bcm ar15 rifles
Pingback:dark168
Pingback:eft hack
Pingback:พลาสติกวิศวกรรม
Pingback:sexy-gold.com
Pingback:dark168
Pingback:kc9
Pingback:Al Yarmouk University College
Pingback:massage Bangkok
Pingback:เน็ตบ้าน ais
Pingback:minecraft server
Pingback:nagatop situs scam
Pingback:เช่ารถตู้พร้อมคนขับ
Pingback:Aviator
Pingback:casino
Pingback:ufabet789
Pingback:ufa777
Pingback:โคมไฟ
Pingback:pg168
Pingback:T-Rex
Pingback:Thai restaurant Oregon
Pingback:ระบบสมาชิก
Pingback:เว็บปั้มไลค์
Pingback:สายคาดกล่องอาหาร
Pingback:fortunabola
Pingback:888vipbet
Pingback:Fishbein Law Group
Pingback:display chillers
Pingback:เว็บตรงฝากถอนง่าย
Pingback:ร้านขายไอดีเกม
Pingback:เว็บพนัน BRC123
Pingback:azitromicina
Pingback:linezolid cost canada
Pingback:sertralina
Pingback:lasix medicine for fluid
Pingback:augmentin
Pingback:fluconazole over the counter canada
Pingback:furosemide 40 mg
Pingback:clozapin
Pingback:cialis 5mg price cvs
Pingback:amino tadalafil review
Pingback:vidalista 80 yellow
Pingback:viagra other names
Pingback:tadalafil pill mg
Pingback:viagra pill costco
Pingback:vidalista 20mg uses
Pingback:avanafil price
Pingback:หวยเฮง789
Pingback:dutasteride tablet amazon
Pingback:finasteride menopause reddit
Pingback:sémaglutide injection perte de poids
Pingback:semaglutid receptfritt
Pingback:semaglutid naturligt
Pingback:images of cialis
Pingback:terbinafine antifungal guide
Pingback:ivermectin treatment reference
Pingback:ivermectin demodex scientific overview
Pingback:ivermectin strongyloides expert insights
Pingback:ivermectin mechanism article
Pingback:ivermectin PK data
Pingback:minoxidil research overview
Pingback:minoxidil foam vs liquid absorption
Pingback:minoxidil women’s complete guide