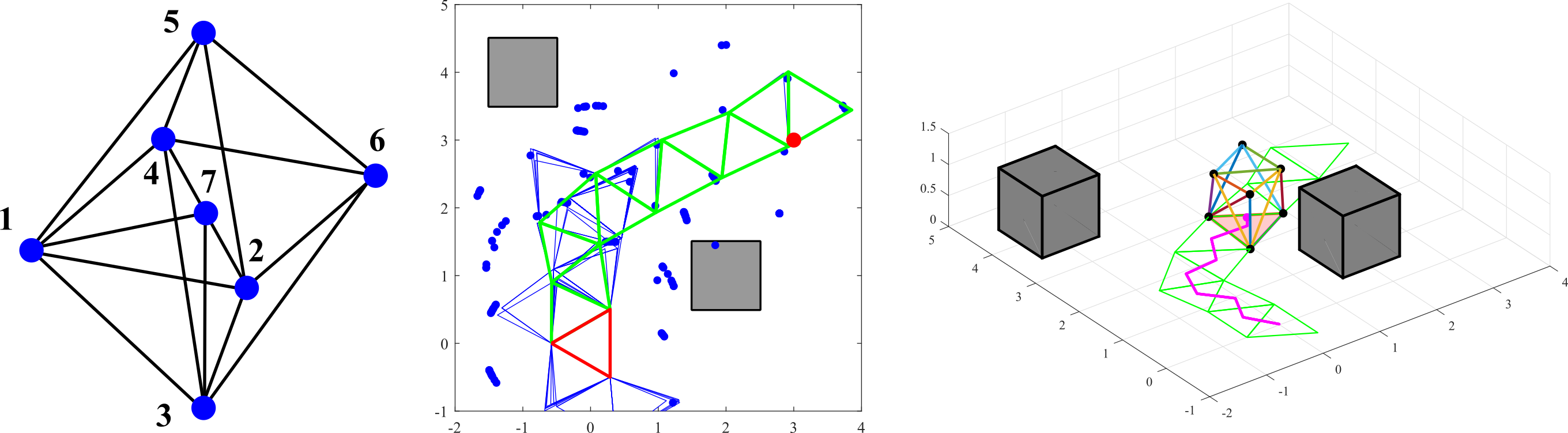
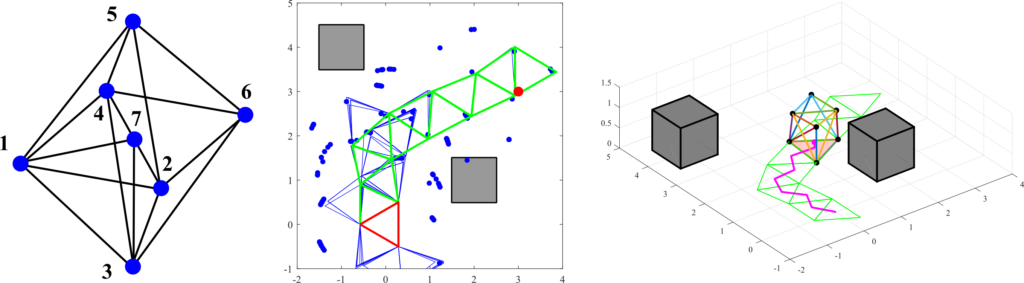
Variable Topology Truss (VTT) is an improved Variable Geometry Truss that can change its topology. We designed the VTT as an octahedron shape by considering topology reconfiguration. The most important task of VTT is locomotion to a random goal position. Previously we used Rapid Random Tree (RRT) to find a trajectory of the center of mass of VTT. This caused a lot of distortion during locomotion, thus it increases the possibility of violating hardware constraints. To prevent this, we proposed the path planning method, Polygon-based Random Tree (PRT) algorithm, that designates desired support polygons for VTT. As shown in Fig. 1, this algorithm can prevent large distortion, compared to the previous RRT algorithm.
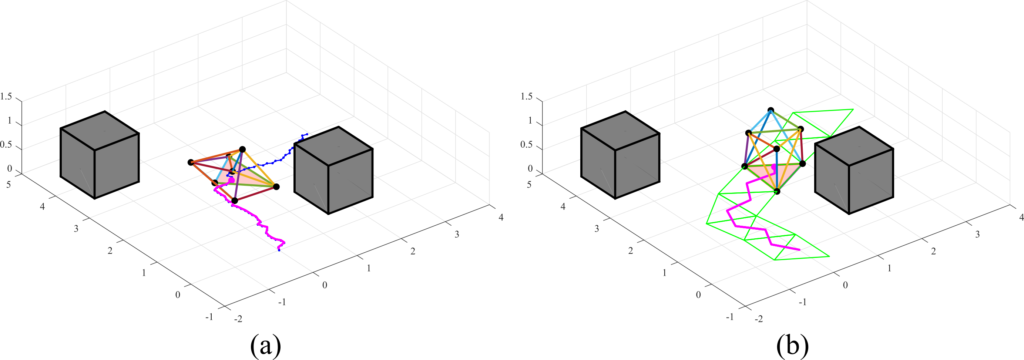
Fig. 1. The locomotion of VTT with two algorithms: (a) The previous RRT algorithm; (b) our proposed PRT algorithm.
A support polygon is defined by connecting the ground-contacting nodes. Because the VTT is octahedron-shaped, the support polygon should be a triangle. We used the random tree search algorithm to find a set of desired support polygons from the initial position to the goal. Fig. 2 summarizes the support polygon finding method. We set an objective point randomly on the workspace. After that, we selected the next foot position closest to the objective point. To give small flexibility to the support polygon, we add a distortion margin and set the next foot position within the distortion margin. The algorithm keeps iterating the process until the next support polygon includes the goal position.
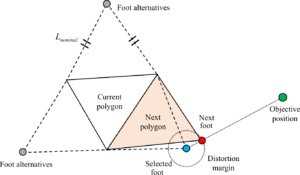
Fig. 2. Diagram of selecting the next foot point for VTT. The next foot point is selected within a distortion margin to prevent large distortion of the support polygon.
Previously, we introduced non-impact rolling locomotion for VTT [1]. By using the locomotion process, we can prevent tipping over which can cause damage to VTT. Fig. 3 shows the overall process of the non-impact rolling locomotion. During the moving phase, VTT moves its center of mass towards the next support polygon. When the center of mass reaches near the edge of the current support polygon, VTT lands its front node during the landing phase. After the center of mass is moved into the next support polygon, VTT continues to move its center of mass until it reaches the center of the next polygon.
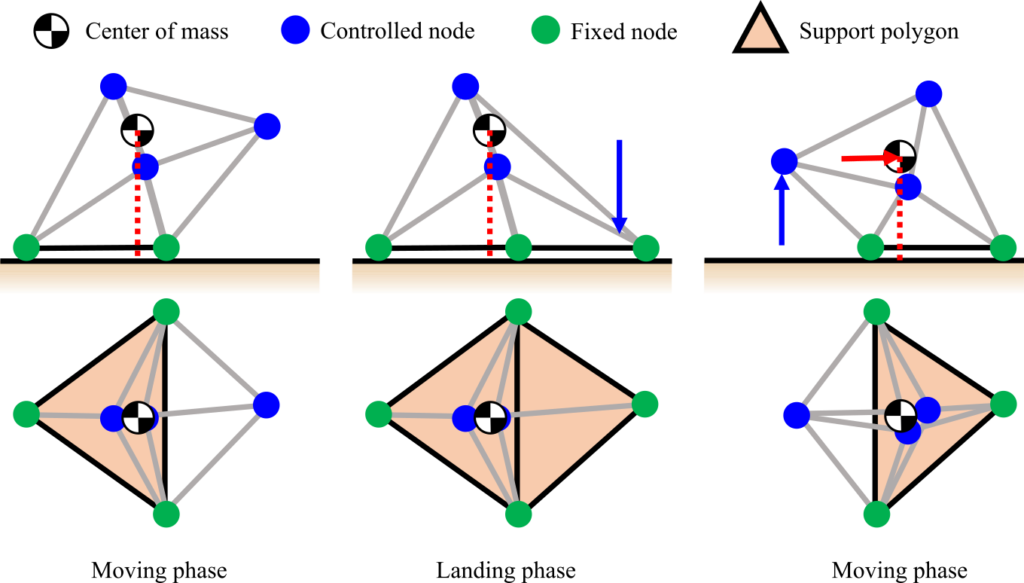
Fig. 3. Non-impact rolling locomotion process.
The advantages of the proposed PRT algorithm were proved by simulations. Three different environments were set for simulation. We concluded that using the PRT algorithm greatly increases the success ratio of locomotion planning. PRT could successfully generate locomotion planning in the environment while the previous method could not generate planning in the same condition. Also, we found PRT reduces the distortion of VTT by checking the length of every member during locomotion.
[1] S. Park, E. Park, M. Yim, J. Kim, and T. W. Seo, “Optimization-based nonimpact rolling locomotion of a variable geometry truss,” IEEE Robot. Autom. Lett., vol. 4, no. 2, pp. 747–752, Apr. 2019.
Publication
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png)
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) S. Park, J. Bae, S. Lee, M. Yim, J. Kim, and T. Seo, “Polygon-based random tree search planning for variable geometry truss robot,” , vol. 5, iss. 2, pp. 813-819, 2020.
S. Park, J. Bae, S. Lee, M. Yim, J. Kim, and T. Seo, “Polygon-based random tree search planning for variable geometry truss robot,” , vol. 5, iss. 2, pp. 813-819, 2020.
[Bibtex]@article{SM:JB:SL:MY:JK:TS:20, title = {Polygon-based Random Tree Search Planning for Variable Geometry Truss Robot}, author = {Park, Sumin and Bae, Jangho and Lee, Seohyeon and Yim, Mark and Kim, Jongwon and Seo, TaeWon}, booktitle = {IEEE Robotics and Automation Letters}, volume={5}, number={2}, pages={813-819}, year={2020}, publisher={IEEE}, doi = {10.1109/LRA.2020.2965871}, ISSN={2377-3766}, month={Apr}, pdf = {https://www.modlabupenn.org/wp-content/uploads/2020/07/Bae_Polygon-Based_Random_RA-L.pdf} }
Pingback:calming music
Pingback:sleep music
Pingback:calm music
Pingback:los angeles night
Pingback:smooth jazz instrumental
Pingback:mail order Psilocybin mushroom Jefferson County Washington
Pingback:buy psilocybin microdose
Pingback:Firearms For Sale
Pingback:sex au dam
Pingback:tải go88
Pingback:altogel
Pingback:https://odindarts.ru/wp-content/uploads/2021/01/89896.html
Pingback:Exology