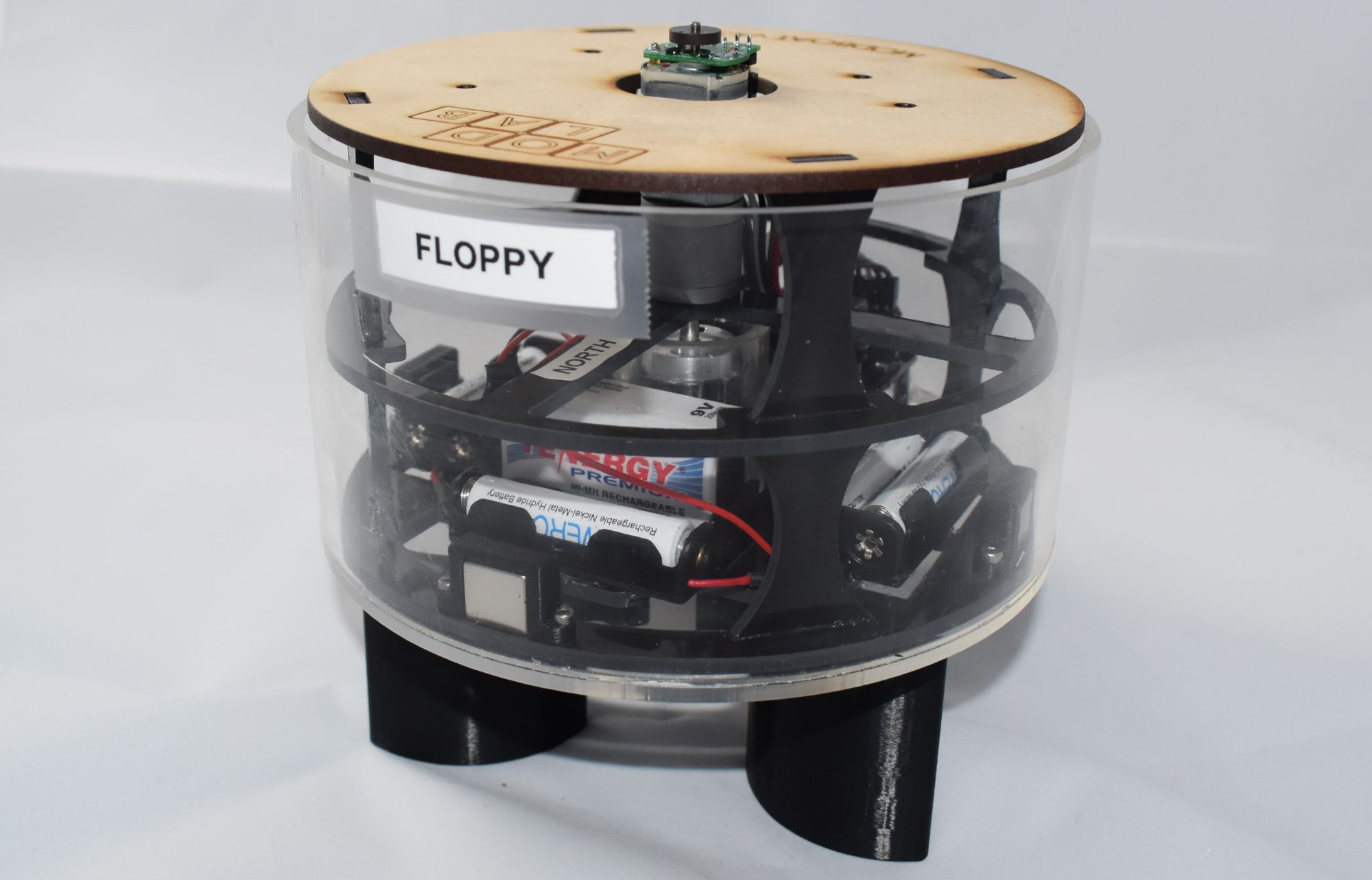
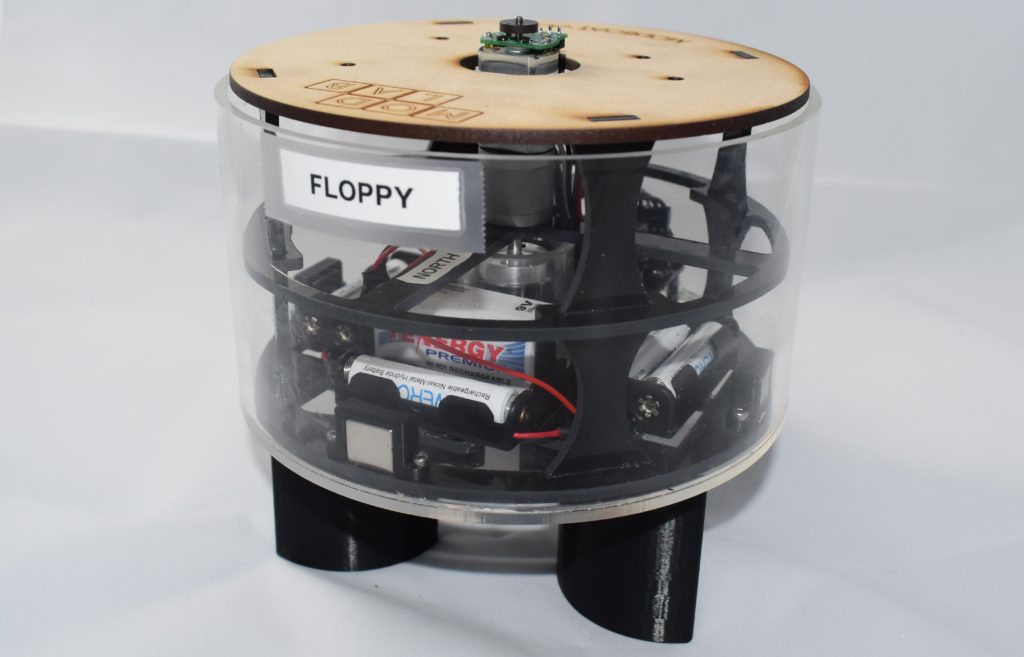
The Modboat is an inexpensive, oscillating surface-swimming robot powered by a single-motor and built from the ground up for low-cost modular self-reconfiguration. Very little work has been done on surface-swimming modular self-reconfigurable robotic systems (MSRRs), and to date it has heavily relied on holonomic modules. The Modboat aims to challenge that paradigm and develop aquatic motion, docking, and self-reconfiguration while being limited to only a single actuator.
The Modboat is featured in a number of publications (listed at the bottom of this page), but its design and actuation method remains unique and relatively unknown in the literature, so this page provides some extra details on the design.
Actuation Design
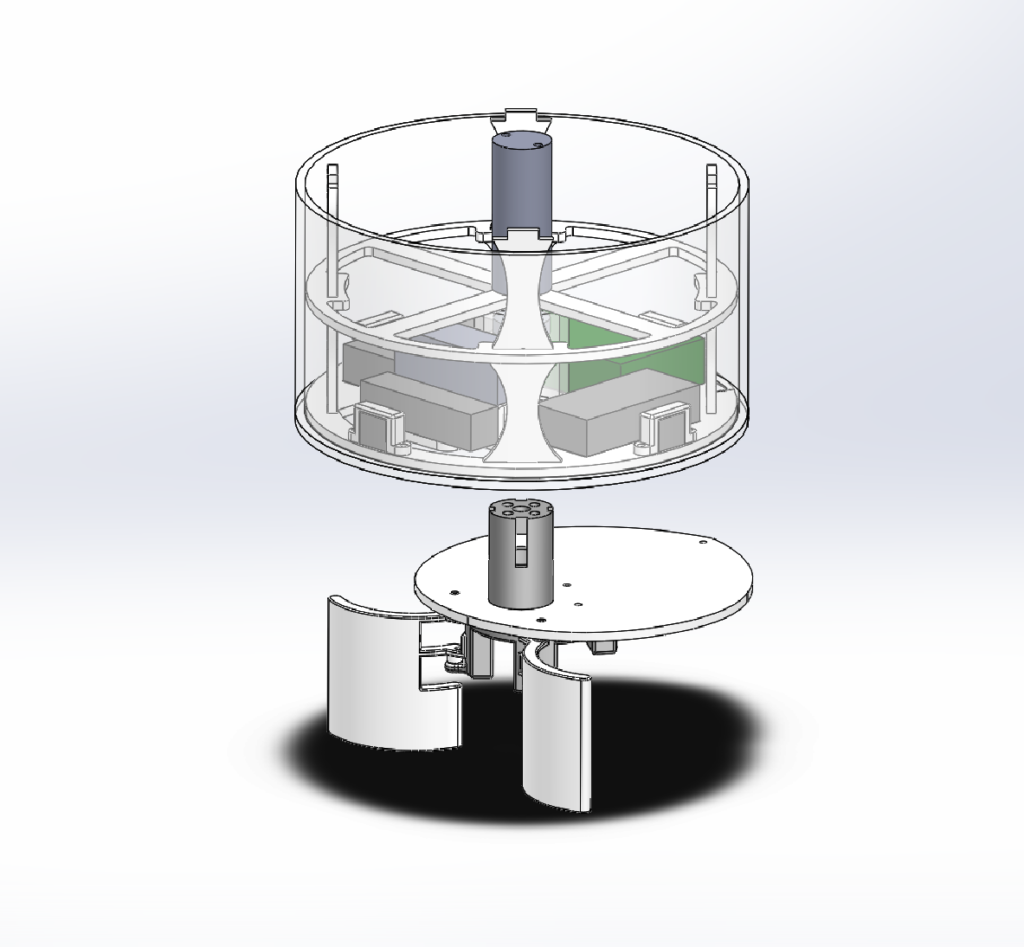
The Modboat consists of two bodies, shown in the exploded view below:
- A large, cylindrical top body that contains docking hardware, electronics, and an ESP32 microprocessor.
- A passive bottom body that contains a tail and two unactuated flippers that are free to rotate.
The two bodies are mechanically linked by the Modboat’s single DC motor, whose body is mounted to the top body and whose shaft is linked to the bottom body. Conservation of angular momentum means that – when the motor is actuated in the water – the two bodies rotate relative to one another, and the inertia of the top body can be used as a base of support to swing the bottom body.
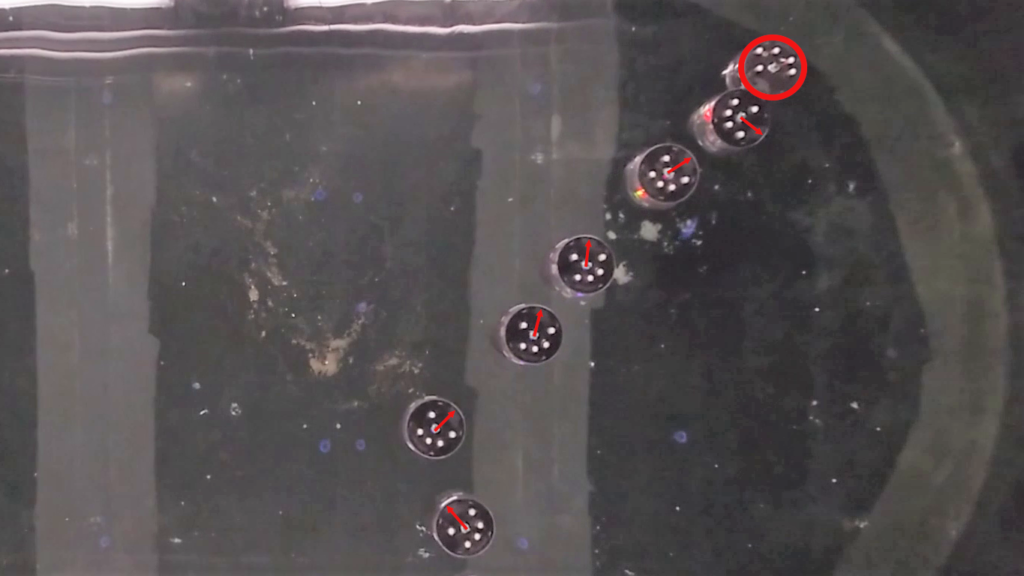
When the bottom body rotates in the water, drag from the surround fluid causes the leading flipper to open against a hard stop, at which point it acts as a drag plate and produces thrust for the Modboat as a whole. If the motor is oscillated, each of the two flippers opens in turn to generate a paddling motion, which is observed from below in the following video:
Various control methods can be achieved by tuning the parameters of the motor’s oscillation:
- The frequency in either direction
- The amplitude of the oscillation
- The centerline of the oscillation
Our research efforts on the motion of individual Modboats have focused on the effects of varying these individual parameters. In particular, the frequency of oscillation was considered in [2] and [3], the centerline in [4] and [5], and the amplitude in [6].
Docking Design
The Modboat design includes a number of aspects designed specifically for modular self-assembly and reconfiguration:
- The bottom body is (almost) entirely encapsulated in the footprint of the top body (see underview video above), which prevents mechanical interference between the flippers of any two boats.
- Four magnets are mounted at the cardinal points inside the Modboat top body, which allow the round Modboats to form a square lattice when docked to one another.
The only exception to the mechanical encapsulation of the bottom body is the tip of the tail. This is an intentional decision to allow undocking from neighboring modules without an additional actuator. Docking is accomplished through passive magnetic attraction; undocking can be achieved by having two modules bring their tails together, which forces the two top bodies apart and breaks the magnetic bond.
A video of a docking procedure and a composite image of two Modboats docking is shown below. Current [6] and future work focuses on controlling the resulting structures to swim as a coordinated group, especially since the protruding tail tip introduces restrictions on allowable waveforms when undocking is not desirable.
Docking in a Flow
Modboats were used to develop flow-based rendezvous and docking approaches. These use the energy present in gyre-like flows to significantly extend the operational life-spans of energy-constrained systems, while not requiring full knowledge of the flow model. Instead, imprecise information about the gyre shape and center are sufficient, which can easily be obtained from local measurements or satellite imagery. Below are two simulations of our control approach in action:
Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png)
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) G. Knizhnik and M. Yim, “Design and Experiments with a Low-Cost Single-Motor Modular Aquatic Robot,” in 2020 17th international conference on ubiquitous robots (ur), Kyoto, Japan (Virtual), 2020, p. 233–240.
G. Knizhnik and M. Yim, “Design and Experiments with a Low-Cost Single-Motor Modular Aquatic Robot,” in 2020 17th international conference on ubiquitous robots (ur), Kyoto, Japan (Virtual), 2020, p. 233–240.
[Bibtex]@inproceedings{GK:MY:20, address = {Kyoto, Japan (Virtual)}, archivePrefix = {arXiv}, arxivId = {2002.01918}, author = {Knizhnik, Gedaliah and Yim, Mark}, booktitle = {2020 17th International Conference on Ubiquitous Robots (UR)}, doi = {10.1109/ur49135.2020.9144872}, eprint = {2002.01918}, pdf = {https://www.modlabupenn.org/wp-content/uploads/2022/02/Knizhnik_UR_2020.pdf}, pages = {233--240}, title = {{Design and Experiments with a Low-Cost Single-Motor Modular Aquatic Robot}}, url = {https://ieeexplore.ieee.org/document/9144872}, year = {2020} }
- G. Knizhnik, P. Dezonia, and M. Yim, “Pauses Provide Effective Control for an Underactuated Oscillating Swimming Robot,” Ieee robotics and automation letters, vol. 5, iss. 4, p. 5075–5080, 2020.
[Bibtex]@article{GK:MY:20a, author = {Knizhnik, Gedaliah and Dezonia, Philip and Yim, Mark}, doi = {10.1109/LRA.2020.3005383}, pdf = {https://www.modlabupenn.org/wp-content/uploads/2022/02/Knizhnik_RAL_2020.pdf}, issn = {23773766}, journal = {IEEE Robotics and Automation Letters}, month = {oct}, number = {4}, pages = {5075--5080}, title = {{Pauses Provide Effective Control for an Underactuated Oscillating Swimming Robot}}, volume = {5}, year = {2020} }
- G. Knizhnik and M. Yim, “Docking and Undocking a Modular Underactuated Oscillating Swimming Robot,” in 2021 ieee international conference on robotics and automation (icra), Xi’an, China, 2021, p. 6754–6760.
[Bibtex]@inproceedings{GK:MY:21, address = {Xi'an, China}, author = {Knizhnik, Gedaliah and Yim, Mark}, booktitle = {2021 IEEE International Conference on Robotics and Automation (ICRA)}, doi = {10.1109/icra48506.2021.9562033}, eprint = {2102.12909}, pdf = {https://www.modlabupenn.org/wp-content/uploads/2022/02/Knizhnik_ICRA_2021.pdf}, pages = {6754--6760}, title = {{Docking and Undocking a Modular Underactuated Oscillating Swimming Robot}}, year = {2021} }
- G. Knizhnik and M. Yim, “Thrust Direction Control of an Underactuated Oscillating Swimming Robot,” in 2021 ieee/rsj international conference on intelligent robots and systems (iros), Prague, Czech Republic (Virtual), 2021, p. 8665–8670.
[Bibtex]@inproceedings{GK:MY:21a, address = {Prague, Czech Republic (Virtual)}, author = {Knizhnik, Gedaliah and Yim, Mark}, booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, doi = {10.1109/IROS51168.2021.9636778}, pdf = {https://www.modlabupenn.org/wp-content/uploads/2022/02/Knizhnik_IROS_2021.pdf}, isbn = {978-1-6654-1714-3}, pages = {8665--8670}, title = {{Thrust Direction Control of an Underactuated Oscillating Swimming Robot}}, url = {https://doi.org/10.1109/IROS51168.2021.9636778 https://ieeexplore.ieee.org/document/9636778/}, year = {2021} }
In Press
G. Knizhnik, P. Li, X. Yu, and M. A. Hsieh, “Flow-Based Control of Marine Robots in Gyre-Like Environments”, 2022 IEEE International Conference on Robotics and Automation (ICRA). Philadelphia, PA. In Press.
G. Knizhnik and M. Yim, “Amplitude Control for Parallel Lattices of Docked Modboats”, 2022 IEEE International Conference on Robotics and Automation (ICRA). Philadelphia, PA. In Press.
Pingback:My Homepage
Pingback:jazz for good new day
Pingback:coffee music
Pingback:type beat japanese
Pingback:piano music
Pingback:soothing music
Pingback:PINNACLE เดิมพัน E-Sport Games
Pingback:+
Pingback:lazywin888
Pingback:best eft hack
Pingback:weight loss products
Pingback:Calligraphy
Pingback:fastspin
Pingback:check that
Pingback:fox888
Pingback:kc9
Pingback:โคมโรงงาน
Pingback:fear of god essentials
Pingback:เช่ารถตู้พร้อมคนขับ
Pingback:ขอขึ้นทะเบียน อย
Pingback:https://mvegascredit.com/2025/03/02/get-connected-with-pocket-option-contact/
Pingback:ricky casino
Pingback:visit
Pingback:ยาแก้ร้อนใน
Pingback:face exercise
Pingback:Brandon
Pingback:snus
Pingback:เครื่องทําสเลอปี้
Pingback:supa gro kit
Pingback:https://www.diarioluso-galaico.com/articulo/deporte/la-media-maraton-de-vigo-abre-espacios-cerrados-habitualmente-a-los-peatones/20211029013247021805.html
Pingback:เว็บพนันออนไลน์เว็บตรง
Pingback:รับติดตั้งระบบระบายอากาศ
Pingback:informática lisboa empresa
Pingback:เช่ารถเครน
Pingback:ดูแลผู้สูงอายุ
Pingback:vps forex
Pingback:1win
Pingback:1xslots argentina
Pingback:ตู้ล่าม
Pingback:clothing manufacturer
Pingback:รับก่อสร้าง อพาร์ทเมนท์
Pingback:ขายเหล็ก
Pingback:propecia medication
Pingback:furosemide 40 mg tablet
Pingback:ivermectin for human
Pingback:tadalafil tablets
Pingback:zithromax 500mg
Pingback:viagra price
Pingback:doxycycline mono 100mg
Pingback:fluconazole tablet
Pingback:remeron 15 mg for sleep
Pingback:fluconazole 200 mg yeast infection
Pingback:jalyn
Pingback:cheap antibiotics
Pingback:topical antibiotics
Pingback:doxycycline for dogs ears
Pingback:diflucan over the counter ireland
Pingback:avanafil online kaufen
Pingback:vibramycin for pneumonia
Pingback:furosemide 20 mg tablet for dogs
Pingback:tadalafil vidalista 60 mg
Pingback:cialis peak performance
Pingback:mesalamine dosage forms
Pingback:avanafil pills price
Pingback:sémaglutide injection prix new york
Pingback:topamax generic name
Pingback:minoxidil hair shampoo
Pingback:acyclovir cream how supplied
Pingback:bupropion side effects 300mg
Pingback:max dose saxenda
Pingback:terbinafine mechanism analysis
Pingback:ketoconazole moa overview
Pingback:toradol migraine relief dosing
Pingback:ivermectin demodex treatment overview
Pingback:ivermectin topical safety
Pingback:ivermectin mechanism full explanation
Pingback:minoxidil controlled trial evidence