Polygon-based Random Tree Search Algorithm for a Size-Changing Robot
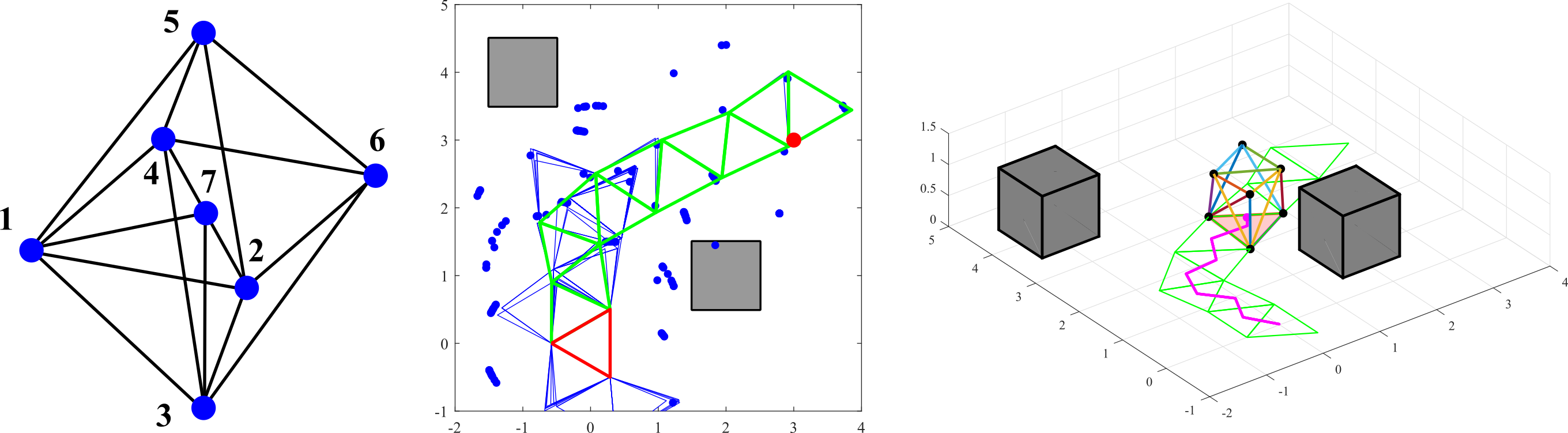
Fig. 1. Summary figure of the study: (a) The octahedron shape VTT; (b) Path planning through the narrow passage; (c) Locomotion simulation through the narrow passage. We proposed the Polygon-based Random Tree (PRT) search algorithm for path planning of the Variable Topology Truss (VTT) system [1]. PRT search algorithm finds the path to the goal …
Read more “Polygon-based Random Tree Search Algorithm for a Size-Changing Robot”