Alexander Spinos

Research Interests: Self-Reconfigurable Robots, Truss Robots
Office: PERCH
Email: spinos at seas.upenn.edu
Personal Page
Publications
- A. Spinos and M. Yim, “Collision-free reconfiguration planning for variable topology trusses using a linking invariant,” in 2023 ieee/rsj international conference on intelligent robots and systems (iros), 2023, p. 2210–2215.
[Bibtex]@inproceedings{spinos2023collision, title={Collision-Free Reconfiguration Planning for Variable Topology Trusses Using a Linking Invariant}, author={Spinos, Alexander and Yim, Mark}, booktitle={2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, pages={2210--2215}, year={2023}, organization={IEEE} } -
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png)
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) A. Spinos and M. Yim, “A linking invariant for truss robot motion planning,” Ieee robotics and automation letters, vol. 7, iss. 2, pp. 1424-1430, 2022.
A. Spinos and M. Yim, “A linking invariant for truss robot motion planning,” Ieee robotics and automation letters, vol. 7, iss. 2, pp. 1424-1430, 2022.
[Bibtex]@article{AS:MY:22, author={Spinos, Alexander and Yim, Mark}, journal={IEEE Robotics and Automation Letters}, title={A Linking Invariant for Truss Robot Motion Planning}, year={2022}, volume={7}, number={2}, pages={1424-1430}, doi={10.1109/LRA.2021.3139941}, pdf={https://www.modlabupenn.org/wp-content/uploads/2022/08/spinos_linking_invariant_RAL_ICRA2022.pdf}, publisher={IEEE} } - A. Spinos, D. Carroll, T. Kientz, and M. Yim, “Topological reconfiguration planning for a variable topology truss,” Journal of mechanisms and robotics, 2021.
[Bibtex]@article{AS:DC:TK:MY:21, author = {Alexander {Spinos} and Devin {Carroll} and Terry {Kientz} and Mark {Yim}}, title = {Topological Reconfiguration Planning for a Variable Topology Truss}, journal = {Journal of Mechanisms and Robotics}, year = 2021, doi = {10.1115/1.4050530} } - S. Jeong, B. Kim, S. Park, E. Park, A. Spinos, D. Carroll, T. Tsabedze, Y. Weng, T. Seo, M. Yim, F. C. Park, and J. Kim, “Variable topology truss: hardware overview, reconfiguration planning and locomotion,” in 2018 15th international conference on ubiquitous robots (ur), 2018.
[Bibtex]@inproceedings{SJ:BK:SP:EP:AS:DC:TT:YW:TS:MY:FCP:JK:18, title = {Variable Topology Truss: Hardware Overview, Reconfiguration Planning and Locomotion}, author = {Jeong, Seongjae and Kim, Byungheon and Park, Sumin and Park, Eugene and Spinos, Alexander and Carroll, Devin and Tsabedze, Thulani and Weng, Yulai and Seo, TaeWon and Yim, Mark and Park, Frank C. and Kim, Jongwon}, booktitle = {2018 15th International Conference on Ubiquitous Robots (UR)}, year = {2018}, month = {June}, } - A. Spinos and M. Yim, “Towards a variable topology truss for shoring,” in Ubiquitous robots and ambient intelligence (urai), 2017 14th international conference on, 2017, p. 244–249.
[Bibtex]@inproceedings{AS:MY:17, title={Towards a variable topology truss for shoring}, author={Spinos, Alexander and Yim, Mark}, booktitle={Ubiquitous Robots and Ambient Intelligence (URAI), 2017 14th International Conference on}, pages={244--249}, year={2017}, organization={IEEE}, doi={10.1109/URAI.2017.7992723}, pdf={https://www.modlabupenn.org/wp-content/uploads/2017/10/spinos2017vttshoring.pdf} } - A. Spinos, D. Carroll, T. Kientz, and M. Yim, “Variable topology truss: design and analysis,” in 2017 ieee/rsj international conference on intelligent robots and systems (iros), Vancouver, Canada, 2017.
[Bibtex]@inproceedings{AS:DC:TK:MY:17, title = {Variable Topology Truss: Design and Analysis}, author = {Spinos, Alexander and Carroll, Devin and Kientz, Terry and Yim, Mark}, booktitle = {2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, address = {Vancouver, Canada}, year = {2017}, pdf={https://www.modlabupenn.org/wp-content/uploads/2017/10/spinos2017vttdesign.pdf} }
Projects
A Linking Invariant for Truss Robot Motion Planning
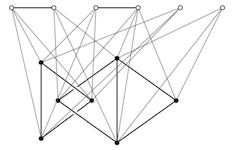
We introduce a new invariant for truss robot motion planning, called the link-augmented graph. This gives you a way to quickly tell if the start and goal configurations of a motion planning query might have a collision-free path between them.
Topological Reconfiguration Planning for a Variable Topology Truss

Variable Topology Trusses (VTT) are a new class of self-reconfigurable robot. A VTT consists of linear actuators for the truss members, which are joined at the truss nodes by a special reconfigurable spherical joint. The VTT can reconfigure by merging and splitting these truss nodes. This article covers the contributions of our journal article about …
Read more "Topological Reconfiguration Planning for a Variable Topology Truss"
Variable Topology Truss
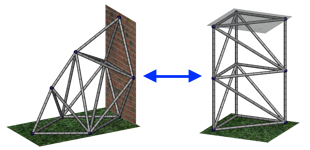
Variable Topology Trusses (VTT) are a new class of self-reconfigurable robot. A VTT consists of linear actuators for the truss members, which are joined at the truss nodes by a special reconfigurable spherical joint. The VTT can reconfigure by merging and splitting these truss nodes. This page is the overall page for all VTT-related research. …
Variable Topology Truss: Concept, Design and Analysis
Variable Topology Trusses (VTT) are a new class of self-reconfigurable robot. A VTT consists of linear actuators for the truss members, which are joined at the truss nodes by a special reconfigurable spherical joint. The VTT can reconfigure by merging and splitting these truss nodes.