Nick Eckenstein

Research Interests: Self-Aligning Connectors, Computer Vision for Modular Robots, Novel Mechanisms
Office: Modlab/Main Grasp
Email: neck at seas.upenn.edu
Personal Page
Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png) A. Specian, N. Eckenstein, R. Mead, B. McDorman, S. Kim, M. Mataric, and M. Yim, “Preliminary system and hardware design for quori, a low-cost, modular, socially interactive robot,” in 2018 hri workshop social robots in the wild, 2018, p. 1–6.
A. Specian, N. Eckenstein, R. Mead, B. McDorman, S. Kim, M. Mataric, and M. Yim, “Preliminary system and hardware design for quori, a low-cost, modular, socially interactive robot,” in 2018 hri workshop social robots in the wild, 2018, p. 1–6.
[Bibtex]@inproceedings{AS:NE:MY:18, title={Preliminary system and hardware design for Quori, a low-cost, modular, socially interactive robot}, author={Specian, Andrew and Eckenstein, Nick and Mead, Ross and McDorman, Braden and Kim, Simon and Mataric, Maja and Yim, Mark}, booktitle={2018 HRI Workshop Social Robots in the Wild}, pages={1--6}, year={2018}, pdf={ https://www.modlabupenn.org/wp-content/uploads/2018/03/Specian_Quori_Hardware_HRI_Workshop_2018.pdf} } - N. Eckenstein and M. Yim, “Modular robot connector area of acceptance from configuration space obstacles,” in 2017 ieee/rsj international conference on intelligent robots and systems (iros), Vancouver, Canada, 2017.
[Bibtex]@inproceedings{NE:MY:17, title = {Modular Robot Connector Area of Acceptance from Configuration Space Obstacles}, author = {Eckenstein, Nick and Yim, Mark}, booktitle = {2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, address = {Vancouver, Canada}, year = {2017}, pdf={https://www.modlabupenn.org/wp-content/uploads/2017/10/2017_Modular_Robot_Connector_Area_of_Acceptance_from_Configuration_Space_Obstacles.pdf} } - N. Eckenstein, T. Tosun, and M. Yim, “Self-reconfigurable modular connection systems,” in Proc. of intl/ workshop on robot modularity at the ieee/rsj intelligent robots and systems (iros), 2016.
[Bibtex]@inproceedings{NE:TT:MY:16, title={Self-reconfigurable Modular Connection Systems}, author={Eckenstein, Nick and Tosun, Tarik and Yim, Mark}, booktitle={Proc. of Intl/ Workshop on Robot Modularity at the IEEE/RSJ Intelligent Robots and Systems (IROS)}, year={2016}, } -
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) J. Paulos, N. Eckenstein, T. Tosun, J. Seo, J. Davey, J. Greco, V. Kumar, and M. Yim, “Automated self-assembly of large maritime structures by a team of robotic boats,” Automation science and engineering, ieee transactions on, vol. 12, iss. 3, pp. 958-968, 2015.
J. Paulos, N. Eckenstein, T. Tosun, J. Seo, J. Davey, J. Greco, V. Kumar, and M. Yim, “Automated self-assembly of large maritime structures by a team of robotic boats,” Automation science and engineering, ieee transactions on, vol. 12, iss. 3, pp. 958-968, 2015.
[Bibtex]@ARTICLE{JP:NE:TT:JS:JD:JG:VK:MY:15, author={Paulos, J. and Eckenstein, N. and Tosun, T. and Seo, J. and Davey, J. and Greco, J. and Kumar, V. and Yim, M.}, journal={Automation Science and Engineering, IEEE Transactions on}, title={Automated Self-Assembly of Large Maritime Structures by a Team of Robotic Boats}, year={2015}, month={July}, volume={12}, number={3}, pages={958-968}, keywords={Assembly;Boats;Computers;Planning;Robots;Trajectory;Winches;Autonomous surface craft;modular construction;modular robot;multirobot systems;self-assembly;self-reconfigurable}, doi={10.1109/TASE.2015.2416678}, pdf={http://modlabupenn.org/wp-content/uploads/paulos_automated_self_assembly_TASE_2015.pdf}, ISSN={1545-5955} } - N. Eckenstein and M. Yim, “Modular reconfigurable robotic systems: lattice automata,” in Robots and lattice automata, Springer international publishing, 2015, p. 47–75.
[Bibtex]@incollection{NE:MY:15:2, title={Modular Reconfigurable Robotic Systems: Lattice Automata}, author={Eckenstein, Nick and Yim, Mark}, booktitle={Robots and Lattice Automata}, pages={47--75}, year={2015}, doi={10.1007/978-3-319-10924-4_3}, publisher={Springer International Publishing} } - N. Eckenstein and M. Yim, “Design, principles, and testing of a latching modular robot connector,” in 2014 ieee/rsj international conference on intelligent robots and systems (iros 2014), 2014, p. 2846–2851.
[Bibtex]@inproceedings{NE:MY:14:9, title={Design, principles, and testing of a latching modular robot connector}, author={Eckenstein, Nick and Yim, Mark}, booktitle={2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014)}, pages={2846--2851}, doi={10.1109/IROS.2014.6942953}, year={2014}, organization={IEEE}, pdf={http://modlabupenn.org/wp-content/uploads/latching_xface_overlay.pdf}, } - N. Eckenstein and M. Yim, “Area of acceptance for 3d self-aligning robotic connectors: concepts, metrics, and designs,” in 2014 ieee international conference on robotics and automation (icra 2014), 2014.
[Bibtex]@inproceedings{NE:MY:14:5, author={Eckenstein, Nick and Yim, Mark}, title={Area of Acceptance for 3D Self-Aligning Robotic Connectors: Concepts, Metrics, and Designs}, booktitle={2014 IEEE International Conference on Robotics and Automation (ICRA 2014)}, doi={10.1109/ICRA.2014.6907010}, pages={}, year={2014}, organization={IEEE}, pdf={http://modlabupenn.org/wp-content/uploads/xface_3d_overlay.pdf}, } - I. O’Hara, J. Paulos, J. Davey, N. Eckenstein, N. Doshi, T. Tosun, J. Greco, J. Seo, M. Turpin, V. Kumar, and M. Yim, “Self-assembly of a swarm of autonomous boats into floating structures,” in 2014 ieee international conference on robotics and automation (icra 2014), 2014.
[Bibtex]@INPROCEEDINGS{IO:JP:JD:NE:ND:TT:JG:JS:MT:VK:MY:14:5, author={O'Hara, Ian and Paulos, James and Davey, Jay and Eckenstein, Nick and Doshi, Neel and Tosun, Tarik and Greco, Jonathan and Seo, Jungwon and Turpin, Matt and Kumar, Vijay and Yim, Mark}, booktitle={2014 IEEE International Conference on Robotics and Automation (ICRA 2014)}, title={Self-Assembly of a Swarm of Autonomous Boats into Floating Structures}, doi={10.1109/ICRA.2014.6907011}, year={2014}, month={June}, pdf={http://modlabupenn.org/wp-content/uploads/ieee_copyright_overlay_dtemp.pdf}, } - N. Eckenstein and M. Yim, “Modular advantage and kinematic decoupling in gravity compensated robotic systems,” Journal of mechanisms and robotics, vol. 5, 2013.
[Bibtex]@article{NE:MY:13, year={2013}, journal={Journal of Mechanisms and Robotics}, volume={5}, issue={4}, doi={10.1115/1.4025218}, title={Modular Advantage and Kinematic Decoupling in Gravity Compensated Robotic Systems}, publisher={ASME}, author={Eckenstein, N. and Yim, M.}, language={English}, } - N. Eckenstein and M. Yim, “The x-face: an improved planar passive mechanical connector for modular self-reconfigurable robots,” in Intelligent robots and systems (iros), 2012 ieee/rsj international conference on, Vilamoura, Algarve, Portugal, 2012, pp. 3073-3078.
[Bibtex]@INPROCEEDINGS{NE:MY:12, author={Eckenstein, N. and Yim, M.}, booktitle={Intelligent Robots and Systems (IROS), 2012 IEEE/RSJ International Conference on}, title={The X-Face: An improved planar passive mechanical connector for modular self-reconfigurable robots}, year={2012}, month={October 7-12}, address={Vilamoura, Algarve, Portugal}, pages={3073-3078}, keywords={reliability;robots;self-adjusting systems;X-face;gendered mating faces;low-profile docking face;modular reconfigurable robot systems;modular self-reconfigurable robots;planar passive mechanical connector;reliability;Connectors;Face;Geometry;Measurement;Robot sensing systems;Robustness}, doi={10.1109/IROS.2012.6386150}, ISSN={2153-0858}, pdf={http://modlabupenn.org/wp-content/uploads/X-Face.pdf}, }
Projects
High-Dimensional Area of Acceptance Using Discrete Methods
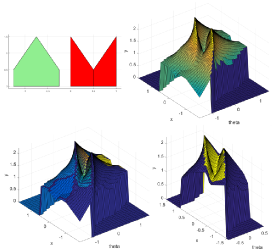
Physical connectors with self-aligning geometry aid in the docking process for many robotic and automatic control systems such as robotic self-reconfiguration and air-to-air refueling. This self-aligning geometry provides a wider range of acceptable error tolerance in relative pose between the two rigid objects, increasing successful docking chances. A new, more discrete flooding method for analyzing …
Read more "High-Dimensional Area of Acceptance Using Discrete Methods"
Quori: A Community-Driven Modular Research Platform for Sociable Human-Robot Interaction
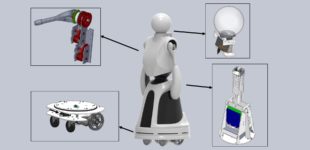
Quori is a novel, affordable, socially interactive robot platform for enabling non-contact human-robot interaction (HRI) research in both in-lab and “in the wild” experimental settings. The package will be complete with an expressive projected face, two gesturing arms, bowing spine, and an omnidirectional base. Software is provided at the low-level to control the hardware and at the high-level, provided by Semio, to easily generate versatile social behaviors.
Modular Robot Connector Acceptance by Configuration Space Analysis

Attachment and detachment between modules is critical for modular robot reconfiguration, and is a key design area for these systems. By re-purposing the interpretation of a well-known motion planning tool in configuration space obstacles for its encoding of contact geometry, we have developed a method for determining a metric of the region of error tolerance …
Read more "Modular Robot Connector Acceptance by Configuration Space Analysis"
Tactically Expandable Maritime Platform (T.E.M.P.)
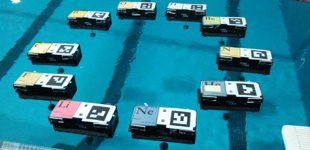
We have built a system of shipping container sized robotic boats that can hook onto each other. We demonstrate the conceptual design of a system that is capable of constructing bridges and various shaped islands that can be made compliant to waves.
X-Face
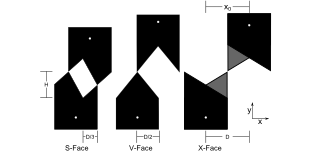
Docking and undocking are common activities for robots (modular robots in particular). The relative frequency of this operation behooves us to ensure reliable alignment under uncertain conditions. We present a new face geometry that is numerically superior to existing alignment geometries. This geometry is intended for two-dimensional reconfigurable robots.
Factory Floor
The factory floor is an experimental robotic system for the construction of passive robotically-reconfigurable truss structures. The macroscopic goal of this work is to embed autonomous reconfigurability into human-built systems.