Quori is a novel, affordable, socially interactive robot platform for enabling non-contact human-robot interaction (HRI) research in both in-lab and “in the wild” experimental settings. The package will be complete with an expressive projected face, two gesturing arms, bowing spine, and an omnidirectional base. Software is provided at the low-level to control the hardware and at the high-level, provided by Semio, to easily generate versatile social behaviors.
Advances in sensor and communication technologies have facilitated progress in computing research on physical platforms. The field of human-robot interaction (HRI) has grown significantly in the last decade and a half, and actively brings together an interdisciplinary community of researchers across computing, AI, robotics, and social science. However, progress has been limited by the lack of affordable, general-purpose, modular hardware robot platforms with available low-level software that would enable large numbers of computing researchers to enter the field and develop and test algorithms, as well as conduct statistically significant user studies by deploying systems in the real world and collecting user data to inform further computational research in HRI.
Community-Driven
By working with the HRI community to identify the most important hardware capabilities for a socially interactive robot, some optimization can be achieved to lower cost and maximize functionality. The input of the HRI community on Quori’s design process was collected via on-line surveys, hosted workshops, and conference presentations. The data collected from our quorum (a diverse group of researchers in the broader HRI community) directed our design decisions for Quori’s hardware and software. Below is a summary of the community feedback.
Expressive Hardware Modules
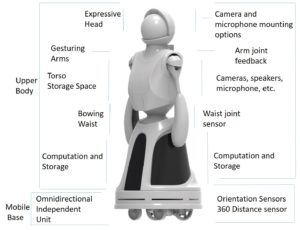
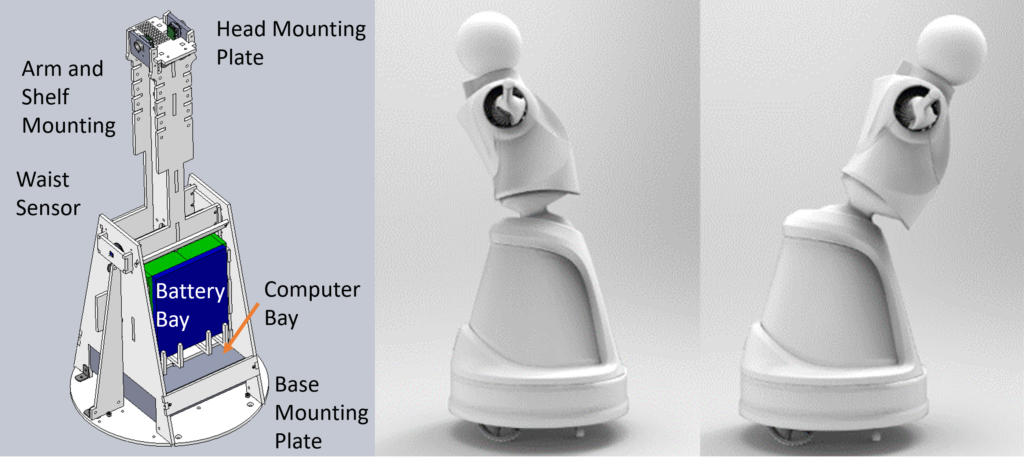
Quori is a low-cost socially interactive robot platform comprised of an upper-body humanoid with a rear projection head and two gesturing arms on a mobile base. Updates for the robot’s hardware are presented on this page. Each component is designed to be modular, expandable, customizable, and affordable.
Projected Head
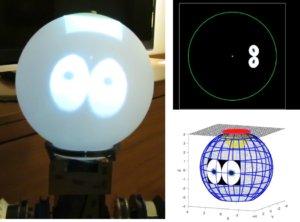
To maximize flexibility, both in the style and apparent motion of the robot’s head, we exploited the relatively recent availability of low-cost portable projectors in a retro-projected animated face
Omnidirectional Mobile Base
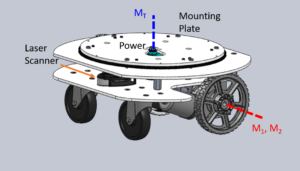
The base measures 19 inches in diameter and 8 inches in height and complies with the 2010 Americans with Disabilities Act. The max speeds the base is able to achieve are 0.8m/s in a straight line and 180 degrees per second with the turret.
Gesturing Arms
 Gestures are a key part of natural communication in social interaction. Our arm design is low-cost, modular, safe, and expandable. Our current version of the arm has two degrees of freedom that mimic the ball joint of a human shoulder.
Gestures are a key part of natural communication in social interaction. Our arm design is low-cost, modular, safe, and expandable. Our current version of the arm has two degrees of freedom that mimic the ball joint of a human shoulder.
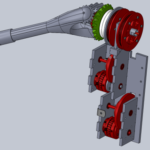
Spine
The spine is designed to not only support the arms, head and other sensors but also to produce useful and natural forward/backward postural motion.
Design

The underlying robot and mechanical systems are clad with a panelized torso, base, and arms. This method allows for the working apparatus of the robot and the body to be separable. The design for each body part was tested to allow for local freedom of movement.Our panels are designed to be swappable for different colors or material. The panels are easily removed or replaced via the magnetic and mechanical alignment and securing features, avoiding visibly mechanical buttons or fasteners on the surface.
Collaborators
![]()
http://robotics.usc.edu/interaction/

Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png) A. Specian, N. Eckenstein, R. Mead, B. McDorman, S. Kim, M. Mataric, and M. Yim, “Preliminary system and hardware design for quori, a low-cost, modular, socially interactive robot,” in 2018 hri workshop social robots in the wild, 2018, p. 1–6.
A. Specian, N. Eckenstein, R. Mead, B. McDorman, S. Kim, M. Mataric, and M. Yim, “Preliminary system and hardware design for quori, a low-cost, modular, socially interactive robot,” in 2018 hri workshop social robots in the wild, 2018, p. 1–6.
[Bibtex]@inproceedings{AS:NE:MY:18, title={Preliminary system and hardware design for Quori, a low-cost, modular, socially interactive robot}, author={Specian, Andrew and Eckenstein, Nick and Mead, Ross and McDorman, Braden and Kim, Simon and Mataric, Maja and Yim, Mark}, booktitle={2018 HRI Workshop Social Robots in the Wild}, pages={1--6}, year={2018}, pdf={ https://www.modlabupenn.org/wp-content/uploads/2018/03/Specian_Quori_Hardware_HRI_Workshop_2018.pdf} }