Recent work in the field of bio-inspired robotic systems has introduced designs for modular robots that are able to assemble into structures (e.g., bridges, landing platforms, fences) using their bodies as the building components. Yet, it remains an open question as to how to program large swarms of robotic modules so that the assembly task is performed as efficiently as possible. Moreover, the problem of designing assembly algorithms is compounded by the scale of these systems, and by the lack of centralized guidance in unstructured environments. The main contribution of this work is a decentralized algorithm to assemble structures with modular robots. Importantly, we coordinate the robots so that docking actions can be parallelized. We show the correctness of our algorithm, and we demonstrate its scalability and generality through multiple scenarios in simulation. Experiments on physical robots demonstrate the validity of our approach in real-world settings.
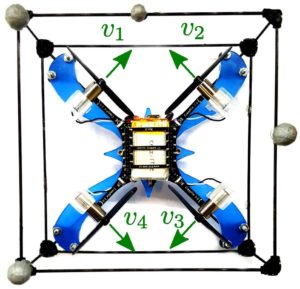
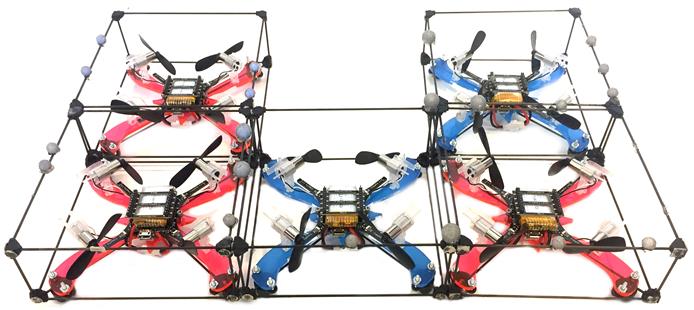
In our experiments with actual robots, we designed a holonomic square modular robot based on the Crazyflie aerial vehicle platform. The robot has four propellers which are oriented to generate thrust in the plane. In this way, the robot can move on surfaces with low friction, or adapted to maneuver on water. In order to determine the robot pose in space as well as relative locations for docking, we are using a motion capture system (VICON) operating at 30 Hz. All commands are computed in ROS and sent to the robot via radio at 2.4 GHz. The docking mechanism is based on passive actuators which in this case is composed of sixteen magnets located in the corners of a cuboid cage.
Conclusions
In this paper, we presented a decentralized algorithm to assemble structures with modular robots. Our approach drives the robots to autonomously assemble a structure in the planar space. Since docking actions are a bottleneck in the assembly process, our algorithm parallelizes these actions while avoiding collisions and undesired attachments. We show the generality of our algorithm using simulations. Through experiments with actual robots, we show that our algorithm can be deployed in real-settings.
Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png) D. Saldana, B. Gabrich, M. Whitzer, A. Prorok, M. F. M. Campos, M. Yim, and V. Kumar, “A decentralized algorithm for assembling structures with modular robots,” in 2017 ieee/rsj international conference on intelligent robots and systems (iros), Vancouver, Canada, 2017.
D. Saldana, B. Gabrich, M. Whitzer, A. Prorok, M. F. M. Campos, M. Yim, and V. Kumar, “A decentralized algorithm for assembling structures with modular robots,” in 2017 ieee/rsj international conference on intelligent robots and systems (iros), Vancouver, Canada, 2017.
[Bibtex]@inproceedings{DS:BG:MW:AM:MFMC:MY:VK:17, title = {A Decentralized Algorithm for Assembling Structures with Modular Robots}, author = {Saldana, David and Gabrich, Bruno and Whitzer, Mickey and Prorok, Amanda and Campos, Mario F.M. and Yim, Mark and Kumar, Vijay}, booktitle = {2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, address = {Vancouver, Canada}, year = {2017}, pdf={https://www.modlabupenn.org/wp-content/uploads/2017/07/Saldana_Gabrich_decentralized_algorithm_IROS_2017.pdf.pdf} }
Pingback:buy high pr dofollow backlinks
Pingback:barber Melbourne
Pingback:see this here
Pingback:เช่ารถตู้พร้อมคนขับ
Pingback:lottovip
Pingback:กล่องบรรจุภัณฑ์
Pingback:โอลี่แฟนxxx
Pingback:LSM99 เว็บหวยออนไลน์ บาทละ 1000
Pingback:โคมไฟ
Pingback:hostel bangkok
Pingback:dk7
Pingback:overwatch aimbot download
Pingback:cheap fortnite hacks
Pingback:nova88bets ปิดแล้ว เข้าเล่นไม่ได้ แทงบอล LSM99 ปลอดภัย จ่ายจริง 100%
Pingback:รับบริการตัดแต่งและแพ็คผักผลไม้
Pingback:ตู้แช่แข็ง
Pingback:Loi Kroh boxing stadium
Pingback:check here
Pingback:สล็อตออนไลน์ เว็บตรงไม่ผ่านเอเย่นต์
Pingback:link
Pingback:sig p320 carry
Pingback:dultogel
Pingback:Angthong National Marine Park
Pingback:สล็อต888 วอเลท
Pingback:Jili apps
Pingback:fear of god essentials
Pingback:Talimatlara git
Pingback:Aviator
Pingback:จองตั๋วรถทัวร์
Pingback:เว็บซื้อหวยลาวพัฒนา แทงได้ง่ายไหม และต่างจาก หวยไทย อย่างไร ?
Pingback:drain cleaning chicago
Pingback:กระดาษสติ๊กเกอร์ความร้อน
Pingback:nzt989
Pingback:land slot auto truewallet
Pingback:Aviator Game
Pingback:เว็บปั้มไลค์
Pingback:Andrew
Pingback:สมัครสมาชิกกับ เว็บบาคาร่าที่คนเล่นเยอะที่สุด
Pingback:penis envy mushroom psilocybin
Pingback:Winspark Italia
Pingback:สล็อตเว็บใหญ่ รวมทุกค่าย
Pingback:ricky casino
Pingback:Hotpot
Pingback:blue magnolia shrooms
Pingback:1xbet
Pingback:ชุดกระชับสัดส่วน