
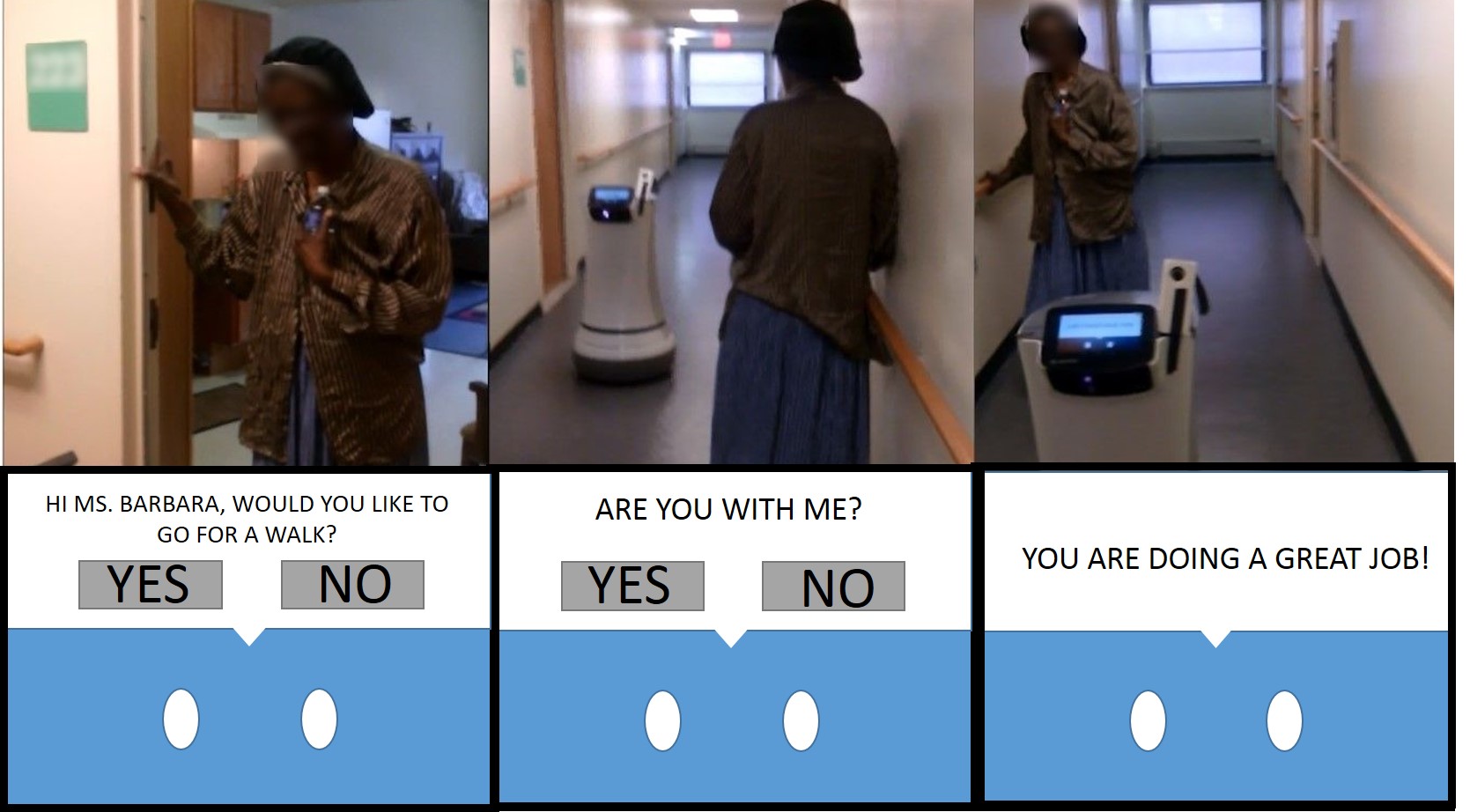
We present findings from two deployments of an autonomous mobile robot in older adult low income Supportive Apartment Living (SAL) facilities. Design guidelines for the robot hardware and software were based on query of clinicians, caregivers and older adults through focus groups, member checks and surveys, to identify what each group believed to be the most important daily activities for older adults to accomplish physically, mentally and socially. After data analysis, hydration and walking encouragement were found to be critical daily activities, becoming the focus of our deployments. The aim of the deployments was to understand the efficacy of human-robot interaction and identify ways to enhance the robot design and programming. Through observation of older adults with the robot and post-interaction surveys filled out by the older adults, conclusions were drawn for further advancement of the robot to be tested in future deployments. Results overall indicated high perceived usefulness and growing acceptance of the robot by older adults with increased interactions.
Conclusions
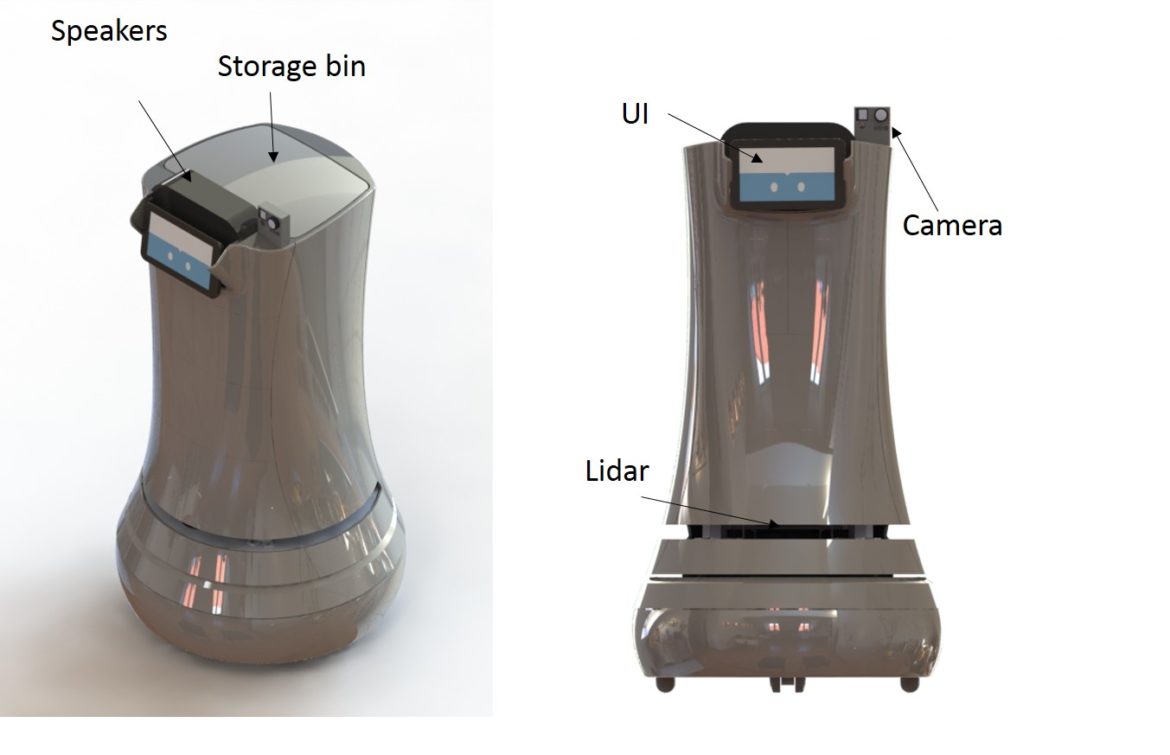
This study describes robot interactions with elders in a low income SAL facility, presenting guidelines for the design of the robot hardware based on human-robot interactions using tasks determined to be important from previous stakeholder focus groups and surveys. Two highly rated tasks requiring a mobile-only robotic base were chosen for study and the robot was adapted to perform both. Data was collected on the robot performance including aspects of human-robot interaction to help in the design of robots and interaction in future deployments, where we plan to integrate an arm onto the mobile base. We will then be able to address a wider range of highly ranked tasks (according to our need finding study). Tasks such as fetching objects on the floor and in cabinets or opening doors emerged on the focus groups and surveys, and future deployments will evaluate the usability and acceptance of the robot in performing those tasks.
Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png) C. Mucchiani, S. Sharma, M. Johnson, J. Sefcik, N. Vivio, J. Huang, P. Cacchione, M. Johnson, R. Rai, A. Canoso, T. Lau, and M. Yim, “Evaluating older adults’ interaction with a mobile assistive robot,” in 2017 ieee/rsj international conference on intelligent robots and systems (iros), Vancouver, Canada, 2017.
C. Mucchiani, S. Sharma, M. Johnson, J. Sefcik, N. Vivio, J. Huang, P. Cacchione, M. Johnson, R. Rai, A. Canoso, T. Lau, and M. Yim, “Evaluating older adults’ interaction with a mobile assistive robot,” in 2017 ieee/rsj international conference on intelligent robots and systems (iros), Vancouver, Canada, 2017.
[Bibtex]@inproceedings{CM:SS:MJ:JS:NV:JH:PC:MJ:RR:AC:TL:MY:17, title = {Evaluating Older Adults’ Interaction with a Mobile Assistive Robot}, author = {Mucchiani, Caio and Sharma, Suneet and Johnson, Megan and Sefcik, Justine and Vivio, Nicholas and Huang, Justin and Cacchione, Pamela and Johnson, Michelle and Rai, Roshan and Canoso, Adrian and Lau, Tessa and Yim, Mark}, booktitle = {2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, address = {Vancouver, Canada}, year = {2017}, pdf={https://www.modlabupenn.org/wp-content/uploads/2017/08/Mucchiani_IROS2017.pdf} }
Pingback:ModLab UPenn » Archive » Spiral Zipper
Pingback:spin238
Pingback:ดูไพ่ยิปซี
Pingback:เครื่องครัว
Pingback:ร้านดอกไม้อารีย์
Pingback:sahabatqq
Pingback:Skrotning bil Angered
Pingback:Extra resources
Pingback:woodland hills personal injury lawyer
Pingback:ติดเน็ตบ้าน AIS
Pingback:ไซด์ไลน์
Pingback:โคมไฟ
Pingback:pilates woodland hills
Pingback:https://www.kurd-rentals.com/
Pingback:more info
Pingback:Dan Helmer
Pingback:ข่าวบอล
Pingback:ไส้เทียมคอลลาเจน
Pingback:harem77
Pingback:webpage
Pingback:ทัวร์เกาะหลีเป๊ะ
Pingback:สล็อตเว็บตรง
Pingback:หาฤกษ์ผ่าตัด
Pingback:เช่ารถตู้พร้อมคนขับ
Pingback:คลินิกปลูกผม
Pingback:ปั้มไลค์
Pingback:fuckboy
Pingback:แผ่นติดหลังคา
Pingback:Chimney Sweeping
Pingback:สล็อตเว็บตรง
Pingback:slot88
Pingback:White Label Payment Gateway
Pingback:colt delta elite
Pingback:外贸网站建设
Pingback:torbook
Pingback:独立站建设
Pingback:เรียนต่อออสเตรเลีย
Pingback:Houses in The Groves
Pingback:สล็อต เครดิตฟรี
Pingback:สล็oต pg เว็บตรงแตกหนัก
Pingback:현금홀덤사이트
Pingback:ส่งพัสดุ
Pingback:dk7
Pingback:https://stealthex.io
Pingback:Browning firearms for sale near me
Pingback:Buy B&T STATION SIX-9 Online
Pingback:fuck