Matthew Piccoli

Research Interests: Underactuated UAVs, Motor Control, and Rapid Robot Design
Office: Towne 170
Email: piccoli at seas.upenn.edu
Personal Page
Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png) M. Piccoli and M. Yim, “Cogging torque ripple minimization via position based characterization,” in Proceedings of robotics: science and systems, Berkeley, USA, 2014.
M. Piccoli and M. Yim, “Cogging torque ripple minimization via position based characterization,” in Proceedings of robotics: science and systems, Berkeley, USA, 2014.
[Bibtex]@INPROCEEDINGS{MP:MY:14:7, AUTHOR = {Matthew Piccoli AND Mark Yim}, TITLE = {Cogging Torque Ripple Minimization via Position Based Characterization}, BOOKTITLE = {Proceedings of Robotics: Science and Systems}, YEAR = {2014}, ADDRESS = {Berkeley, USA}, MONTH = {July}, pdf={http://www.roboticsproceedings.org/rss10/p42.pdf} } -
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) M. Piccoli and M. Yim, “Anticogging: torque ripple suppression, modeling, and parameter selection,” The international journal of robotics research, vol. 35, iss. 1-3, pp. 148-160, 2016.
M. Piccoli and M. Yim, “Anticogging: torque ripple suppression, modeling, and parameter selection,” The international journal of robotics research, vol. 35, iss. 1-3, pp. 148-160, 2016.
[Bibtex]@article{MP:MY:15:10, author = {Piccoli, Matthew and Yim, Mark}, title = {Anticogging: Torque ripple suppression, modeling, and parameter selection}, volume = {35}, number = {1-3}, pages = {148-160}, year = {2016}, doi = {10.1177/0278364915599045}, URL = {http://ijr.sagepub.com/content/35/1-3/148.abstract}, eprint = {http://ijr.sagepub.com/content/35/1-3/148.full.pdf+html}, journal = {The International Journal of Robotics Research}, abstract ={Smooth motion is critical to some robotic applications such as haptics or those requiring high precision force control. These systems are often direct-drive, so any torque ripple in the motor output must be minimal. Unfortunately, low-torque ripple motors are expensive. Low cost brushless direct current motors are becoming more prevalent, especially from the hobby remote control community. These motors often have the required high-torque density; however, they also have significant torque ripple. This paper presents a low cost method for anticogging, the compensation of cogging torque. While other methods exist to compensate for current-based torque ripple (mutual or reluctance torque), none have addressed cogging torque, except by adding expensive force sensors. This paper presents two methods that use a position sensor (already present for servo motors) to map cogging torque to rotor position. The map is played back according to position reported from the sensor to cancel the cogging torque. The design and testing of a low cost haptic arm using anticogging shows validation; however, the approach is much broader, and can be applied to any precision force application. A model of torque ripple sources are included as a function of pulse-width modulation frequency to help choose the optimal pulse-width modulation frequency to minimize torque ripple. Test results on eleven different motors show a removal of up to 88% of torque ripple with no added cost in robotic servo applications, and in some cases having better performance than motors that are over nine times as expensive.}, } - M. Piccoli and M. Yim, “Passive stability of vehicles without angular momentum including quadrotors and ornithopters,” in Robotics and automation (icra), 2015 ieee international conference on, 2015, pp. 1716-1721.
[Bibtex]@INPROCEEDINGS{MP:MY:15, author={Piccoli, Matthew and Yim, Mark}, booktitle={Robotics and Automation (ICRA), 2015 IEEE International Conference on}, title={Passive stability of vehicles without angular momentum including quadrotors and ornithopters}, year={2015}, month={May}, pages={1716-1721}, keywords={Aerodynamics;Damping;Eigenvalues and eigenfunctions;Helicopters;Propellers;Stability analysis;Vehicles}, doi={10.1109/ICRA.2015.7139419}, pdf={http://modlabupenn.org/wp-content/uploads/piccoli_matthew_passive_stability_no_ang_mom_ICRA_2015.pdf} } - S. Latscha, M. Kofron, A. Stroffolino, L. Davis, G. Merritt, M. Piccoli, and M. Yim, “Design of a hybrid exploration robot for air and land deployment (h.e.r.a.l.d) for urban search and rescue applications,” in 2014 ieee/rsj international conference on intelligent robots and systems, 2014, pp. 1868-1873.
[Bibtex]@INPROCEEDINGS{SL:MK:AS:LD:GM:MP:MY:14, author={S. {Latscha} and M. {Kofron} and A. {Stroffolino} and L. {Davis} and G. {Merritt} and M. {Piccoli} and M. {Yim}}, booktitle={2014 IEEE/RSJ International Conference on Intelligent Robots and Systems}, title={Design of a Hybrid Exploration Robot for Air and Land Deployment (H.E.R.A.L.D) for urban search and rescue applications}, year={2014}, pages={1868-1873}, doi={10.1109/IROS.2014.6942808} } - M. Piccoli and M. Yim, “Cogging torque ripple minimization via position based characterization,” in Proceedings of robotics: science and systems, Berkeley, USA, 2014.
[Bibtex]@INPROCEEDINGS{MP:MY:14:7, AUTHOR = {Matthew Piccoli AND Mark Yim}, TITLE = {Cogging Torque Ripple Minimization via Position Based Characterization}, BOOKTITLE = {Proceedings of Robotics: Science and Systems}, YEAR = {2014}, ADDRESS = {Berkeley, USA}, MONTH = {July}, pdf={http://www.roboticsproceedings.org/rss10/p42.pdf} } - M. Piccoli and M. Yim, “Passive stability of a single actuator micro aerial vehicle,” in Robotics and automation (icra), 2014 ieee international conference on, 2014.
[Bibtex]@INPROCEEDINGS{MP:MY:14, author={Piccoli, M. and Yim, M.}, booktitle={Robotics and Automation (ICRA), 2014 IEEE International Conference on}, title={Passive Stability of a Single Actuator Micro Aerial Vehicle}, doi={10.1109/ICRA.2014.6907669}, year={2014}, month={June}, pdf={http://modlabupenn.org/wp-content/uploads/Passive-Stability-of-a-Single-Actuator-MAV.pdf}, } - M. Piccoli, S. Revzen, and M. Yim, “Seal pack versatile, portable, and rapidly deployable sea, air, and land vehicle,” in Safety, security, and rescue robotics (ssrr), 2013 ieee international symposium on, 2013, pp. 1-6.
[Bibtex]@INPROCEEDINGS{MP:SR:MY:13, author={Piccoli, Matthew and Revzen, Shai and Yim, Mark}, booktitle={Safety, Security, and Rescue Robotics (SSRR), 2013 IEEE International Symposium on}, title={SEAL Pack versatile, portable, and rapidly deployable SEa, air, and land vehicle}, year={2013}, month={Oct}, pages={1-6}, keywords={Boats;Brushless motors;Payloads;Propellers;Robots;Seals;Vehicles}, doi={10.1109/SSRR.2013.6719362}, pdf={http://modlabupenn.org/wp-content/uploads/SEAL_Pack.pdf}, } - J. Davey, J. Sastra, M. Piccoli, and M. Yim, “Modlock: a manual connector for reconfigurable modular robots,” in Intelligent robots and systems (iros), 2012 ieee/rsj international conference on, Vilamoura, Algarve, Portugal, 2012, pp. 3217-3222.
[Bibtex]@INPROCEEDINGS{JD:JS:MP:MY:12, author={Davey, J. and Sastra, J. and Piccoli, M. and Yim, M.}, booktitle={Intelligent Robots and Systems (IROS), 2012 IEEE/RSJ International Conference on}, title={ModLock: A manual connector for reconfigurable modular robots}, year={2012}, address={Vilamoura, Algarve, Portugal}, month={October 7-12}, pages={3217-3222}, keywords={helicopters;mobile robots;reconfigurable architectures;ModLock manual connection system;flying quadrotors;legged walkers;low profile connection system;manual connector;modular reconfigurable systems;reconfigurable modular robots;robot configurations;wheeled robots;Assembly;Connectors;Fasteners;Mobile robots;Steel;Torque}, doi={10.1109/IROS.2012.6386190}, ISSN={2153-0858}, pdf={http://modlabupenn.org/wp-content/uploads/ModLock.pdf}, }
Projects
Piccolissimo
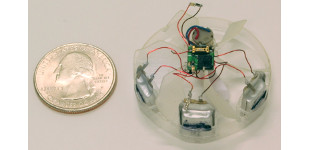
Piccolissimo is the smallest self-powered flying vehicle (to the best of our knowledge). Thanks to its passive stability, it can fly with only one actuator. This makes it simple and low cost to construct and less likely to have a component fail.
Passive Stability of MAVs Without Angular Momentum
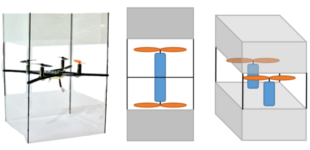
We modeled and built Micro Aerial Vehicles (MAVs) that naturally hover without any sensing or control. These types of vehicles, called passively stabilized vehicles, can be made less complicated, more robust, and at lower cost with the addition of simple, yet carefully designed, stabilizer sails.
Anticogging
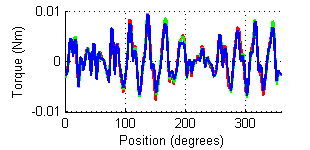
Smooth motion is critical to robotic applications like haptics or those requiring high precision force control. These systems are often direct-drive, so any torque ripple in the motor output must be minimal. Unfortunately, low inherent torque ripple motors are expensive. We came up with a method to map and suppress torque ripple from cogging torque so low cost motors can perform as well as expensive ones, while using only a position sensor, which is already required for servo control. We call this compensation "Anticogging".
Passive Stability of a Single Actuator MAV

In an effort to build one of the world's smallest flying vehicles, we built a flying vehicle with only two moving parts connected by one motor. Because the vehicle cannot control its attitude with its one actuator, passive stability is a required trait, so we derived design requirements for making passively stable vehicles.
SEAL Pack
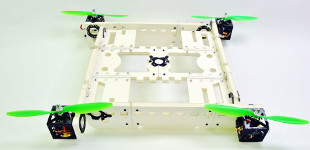
The SEAL Pack is versatile, portable, and quickly deployable, similar to the Navy SEALs. SEAL stands for SEa, Air, and Land and the SEAL Pack is versatile enough to traverse all three. The SEAL Pack is transported in a compact way, and can be unpacked into either a car, boat, or quadrotor in a matter of minutes thanks to its modular design.
ModLock

Connection mechanisms are critical to modular reconfigurable systems. The ModLock manual connection system is both fast to attach/detach and strong. This low cost, low profile connection system has been demonstrated on a variety of robot configurations including legged walkers, flying quadrotors and wheeled robots.
ICRA Robotic Planetary Contingency 2008
ICRA Robotic Planetary Contingency 2008 featured four teams competing in multiple, time sensitive, emergency scenarios with modular robotic solutions.
Quick Change End Effector

This prototype allows PR2 to change end-effectors on his own. He could trade in his hand for a different gripper, a screwdriver, or even a sensor such as a camera. The quick release mechanism makes it easy for him to attach and detach and it also features electrical connections to transfer power and communication.