Piccolissimo is the smallest self-powered flying vehicle (to the best of our knowledge). Thanks to its passive stability, it can fly with only one actuator. This makes it simple and low cost to construct and less likely to have a component fail.
Passive Stability
Piccolissimo builds off of the research from our larger passively stabilized vehicles. Unlike quadrotors, which estimate the direction of gravity with accelerometers and gyroscopes hundreds of times per second then actuate its four motors, we designed Piccolissimo to use its dynamics and aerodynamics to keep gravity in a desired direction. This means Piccolissimo does not require any extra motors to orient it. Its single motor is attached to a propeller on one side, and the body of the vehicle on the other. Since every action has an equal and opposite reaction, when the motor spins the propeller it also spins the body in the opposite direction. The body has stabilizers built into it, which act like another set of propellers. If Piccolissimo travels through the air, the stabilizers that spin into the wind, called the advancing blades, see extra wind and generate extra lift. The stabilizers the move away from the wind see less wind, so they generate less lift. This creates a torque, which tries to make Piccolissimo roll. But Piccolissimo is also a gyroscope, and since gyroscopic precession is felt 90 degrees from where torque is applied, the vehicle pitches instead of rolls. This pitching slows down the vehicle, causing it to hover.
Steering
To make Piccolissimo steer, we moved the motor slightly off center. This makes a continuous torque that tries to flip the vehicle. Since Piccolissimo spins quickly, about 40 to 50 times per second, this torque never gets the chance to actually turn Piccolissimo over. Instead, the direction of the torque changes and ends up cancelling itself out. If we pulse the motor at the speed of the body’s rotation, then we can make this torque not cancel throughout a revolution. By changing the phase of the pulsing we can change the direction of torque generation, allowing Piccolissimo to steer in any direction.

Design and Construction
We designed two versions of Piccolissimo. One that is small, called Mini Piccolissimo, and one that can turn, called Maneuverable Piccolissimo. We take the motors and propellers out of toy quadrotors. In fact, any time a smaller quadrotor goes to market, we can build an even smaller Piccolissimo by removing one of the four motors and propellers.
The motor and propeller are mounted to a 3D printed body. Most are printed on Penn Engineering’s ProJet 6000, but we have also used commercial services like Shapeways which only cost $7.37 per frame. The body frames have three slots for standard Lithium Polymer batteries, much like what you would find in smart watches. We also include some electronics to control the motor and do the pulsing for steering.
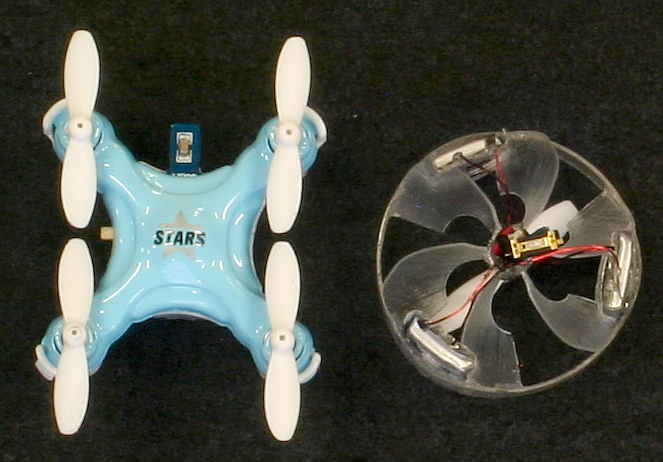
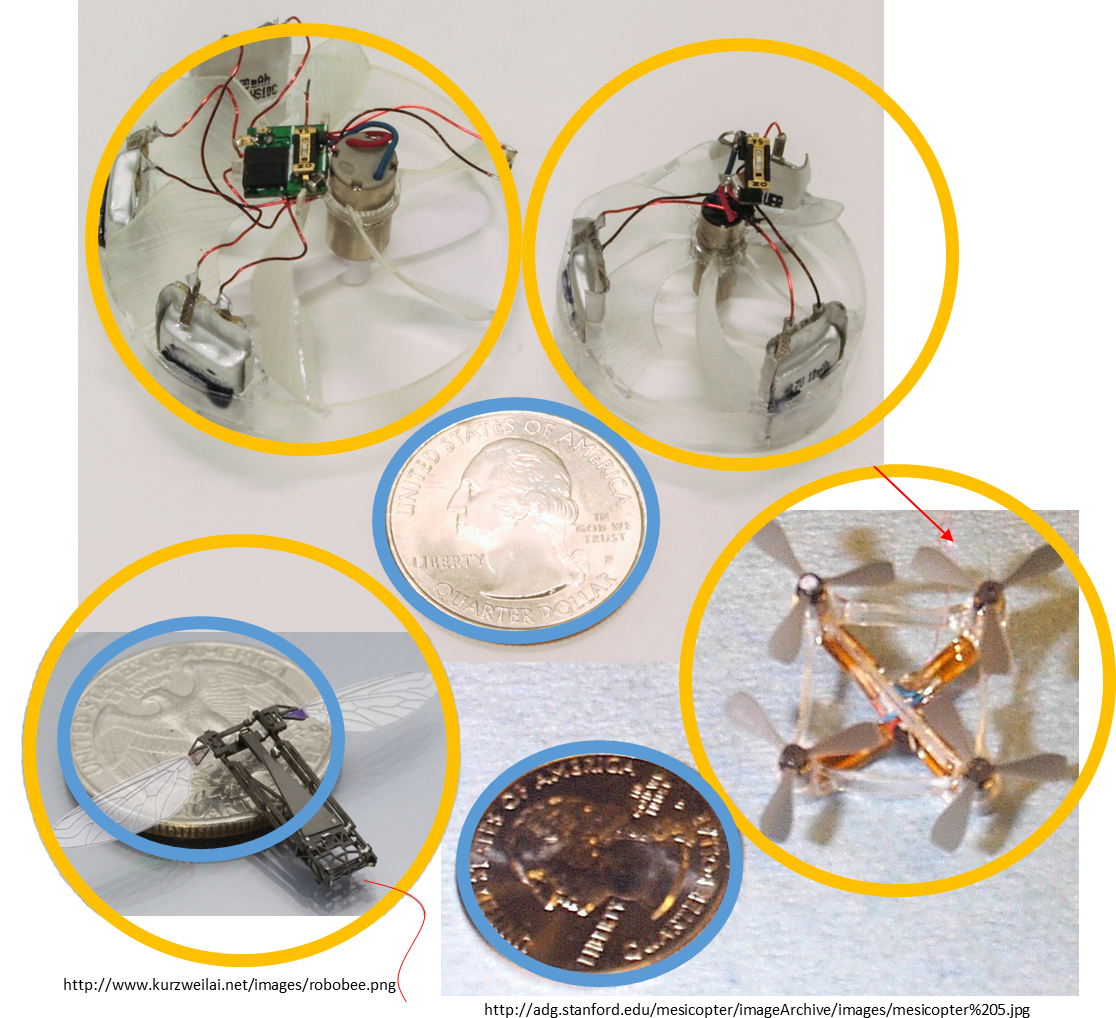
The Maneuverable Piccolissimo’s maximum dimension is 39 mm, which is the perimeter of the rim. On the other hand the Mini Piccolissimo’s maximum dimension, also the perimeter of the rim, is merely 28 mm. For comparison, the Harvard Robobee is 35 mm wingtip to wingtip and the Stanford Mesicopter is about 39 mm, though neither of these vehicles have onboard control nor carry their own power.
Applications
Small, low cost flying vehicles have huge potential. Despite its size, Piccolissimo has about one gram of payload. This might not sound like much, but its more than enough to carry a camera or other atmospherics sensors. In fact, we can mount a simple sensor, like a line scan camera (think barcode reader), on the Piccolissimo’s body, and as the body spins the sensor spins with it, giving a 360 degree panorama. This type sensing is actually quite common. For example, radar at airports spin around so that the radar sensor can be much smaller and lower cost. Even the Hollywood movie Twister had an application for Piccolissimo with their Dorthey tornado monitoring device (based off of the real life TOTO device).