Jay Davey

Research Interests: self-assembling systems, self-reconfigurable systems, modular robotics, cellular robotics
Office: Towne 170
Email: jaydavey at seas.upenn.edu
Personal Page
Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png) J. Davey, M. Yim, J. Luong, H. Klaubert, J. Rembisz, and B. Holson, “Autonomous robot double drive assembly,” , iss. US12204350B1, 2025.
J. Davey, M. Yim, J. Luong, H. Klaubert, J. Rembisz, and B. Holson, “Autonomous robot double drive assembly,” , iss. US12204350B1, 2025.
[Bibtex]@patent{Davey2025AutonomousRobotDoubleDriveAssembly, author = {Davey, Jay and Yim, Mark and Luong, Jamie and Klaubert, Heather and Rembisz, Justine and Holson, Benjie}, title = {Autonomous robot double drive assembly}, number = {US12204350B1}, type = {US Patent}, assignee = {Robust AI Inc}, year = {2025}, month = jan, day = {21}, url = {https://patents.google.com/patent/US12204350B1/en}, eprint = {https://patents.google.com/patent/US12204350B1/en}, note = {Filed Mar 29, 2024. Priority date Mar 4, 2024. Application No. US18/622,640}, pdf = {https://patentimages.storage.googleapis.com/45/9d/98/773b06c708d3cf/US12204350.pdf} } - T. Tosun, J. Davey, C. Liu, and M. Yim, “Design and characterization of the ep-face,” in 2016 ieee/rsj international conference on intelligent robots and systems (iros), 2016.
[Bibtex]@inproceedings{TT:JD:CL:MY:16, title={Design and Characterization of the EP-Face}, author={Tosun, Tarik and Davey, Jay and Liu, Chao and Yim, Mark}, booktitle={2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, year={2016}, pdf={http://modlabupenn.org/wp-content/uploads/tosun2016epface.pdf} } -
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) J. Paulos, N. Eckenstein, T. Tosun, J. Seo, J. Davey, J. Greco, V. Kumar, and M. Yim, “Automated self-assembly of large maritime structures by a team of robotic boats,” Automation science and engineering, ieee transactions on, vol. 12, iss. 3, pp. 958-968, 2015.
J. Paulos, N. Eckenstein, T. Tosun, J. Seo, J. Davey, J. Greco, V. Kumar, and M. Yim, “Automated self-assembly of large maritime structures by a team of robotic boats,” Automation science and engineering, ieee transactions on, vol. 12, iss. 3, pp. 958-968, 2015.
[Bibtex]@ARTICLE{JP:NE:TT:JS:JD:JG:VK:MY:15, author={Paulos, J. and Eckenstein, N. and Tosun, T. and Seo, J. and Davey, J. and Greco, J. and Kumar, V. and Yim, M.}, journal={Automation Science and Engineering, IEEE Transactions on}, title={Automated Self-Assembly of Large Maritime Structures by a Team of Robotic Boats}, year={2015}, month={July}, volume={12}, number={3}, pages={958-968}, keywords={Assembly;Boats;Computers;Planning;Robots;Trajectory;Winches;Autonomous surface craft;modular construction;modular robot;multirobot systems;self-assembly;self-reconfigurable}, doi={10.1109/TASE.2015.2416678}, pdf={http://modlabupenn.org/wp-content/uploads/paulos_automated_self_assembly_TASE_2015.pdf}, ISSN={1545-5955} } - I. O’Hara, J. Paulos, J. Davey, N. Eckenstein, N. Doshi, T. Tosun, J. Greco, J. Seo, M. Turpin, V. Kumar, and M. Yim, “Self-assembly of a swarm of autonomous boats into floating structures,” in 2014 ieee international conference on robotics and automation (icra 2014), 2014.
[Bibtex]@INPROCEEDINGS{IO:JP:JD:NE:ND:TT:JG:JS:MT:VK:MY:14:5, author={O'Hara, Ian and Paulos, James and Davey, Jay and Eckenstein, Nick and Doshi, Neel and Tosun, Tarik and Greco, Jonathan and Seo, Jungwon and Turpin, Matt and Kumar, Vijay and Yim, Mark}, booktitle={2014 IEEE International Conference on Robotics and Automation (ICRA 2014)}, title={Self-Assembly of a Swarm of Autonomous Boats into Floating Structures}, doi={10.1109/ICRA.2014.6907011}, year={2014}, month={June}, pdf={http://modlabupenn.org/wp-content/uploads/ieee_copyright_overlay_dtemp.pdf}, } - J. Davey, J. Sastra, M. Piccoli, and M. Yim, “Modlock: a manual connector for reconfigurable modular robots,” in Intelligent robots and systems (iros), 2012 ieee/rsj international conference on, Vilamoura, Algarve, Portugal, 2012, pp. 3217-3222.
[Bibtex]@INPROCEEDINGS{JD:JS:MP:MY:12, author={Davey, J. and Sastra, J. and Piccoli, M. and Yim, M.}, booktitle={Intelligent Robots and Systems (IROS), 2012 IEEE/RSJ International Conference on}, title={ModLock: A manual connector for reconfigurable modular robots}, year={2012}, address={Vilamoura, Algarve, Portugal}, month={October 7-12}, pages={3217-3222}, keywords={helicopters;mobile robots;reconfigurable architectures;ModLock manual connection system;flying quadrotors;legged walkers;low profile connection system;manual connector;modular reconfigurable systems;reconfigurable modular robots;robot configurations;wheeled robots;Assembly;Connectors;Fasteners;Mobile robots;Steel;Torque}, doi={10.1109/IROS.2012.6386190}, ISSN={2153-0858}, pdf={http://modlabupenn.org/wp-content/uploads/ModLock.pdf}, } - J. Davey, N. Kwok, and M. Yim, “Emulating self-reconfigurable robots – design of the smores system,” in Intelligent robots and systems (iros), 2012 ieee/rsj international conference on, Vilamoura, Algarve, Portugal, 2012, pp. 4464-4469.
[Bibtex]@INPROCEEDINGS{JD:NK:MY:12, author={Davey, J. and Ngai Kwok and Yim, M.}, booktitle={Intelligent Robots and Systems (IROS), 2012 IEEE/RSJ International Conference on}, title={Emulating self-reconfigurable robots - design of the SMORES system}, year={2012}, month={October 7-12}, address={Vilamoura, Algarve, Portugal}, pages={4464-4469}, keywords={robots;self-adjusting systems;SMORES system;chain style reconfiguration;lattice style reconfiguration;mobile reconfiguration;selfassembling modular robot for extreme shape-shifting;selfreconfigurable robots;universal modular robot;Connectors;Gears;Lattices;Mobile communication;Robot kinematics;Wheels}, doi={10.1109/IROS.2012.6385845}, ISSN={2153-0858}, pdf={http://modlabupenn.org/wp-content/uploads/SMORES.pdf},}
Projects
The EP-Face Connector
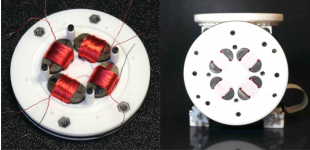
We present the EP-Face connector, a novel connector for hybrid chain-lattice type modular robots that is high- strength (88.4N), compact, fast, power efficient, and robust to position errors.
SMORES-EP

SMORES-EP is a modular robot designed and built at the University of Pennsylvania, and used by researchers at Penn and Cornell. SMORES stands for Self-Assembling MOdular Robot for Extreme Shapeshifting, and EP refers to the Electro-Permanent magnets the modules use to connect.
Persona
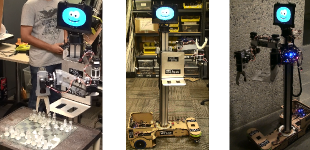
Our mobile telepresence robot is fitted with a robotic manipulator that will allow a person to virtually manipulate the avatar environment. We have shown our robot called "Persona" to be capable of moving up and down ramps, use elevators, manipulate objects such as chess pieces, and to lift and transport loads up to 4.5 kg.
Tactically Expandable Maritime Platform (T.E.M.P.)
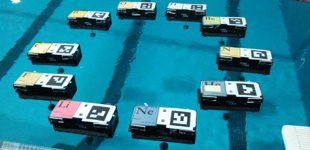
We have built a system of shipping container sized robotic boats that can hook onto each other. We demonstrate the conceptual design of a system that is capable of constructing bridges and various shaped islands that can be made compliant to waves.
ModLock

Connection mechanisms are critical to modular reconfigurable systems. The ModLock manual connection system is both fast to attach/detach and strong. This low cost, low profile connection system has been demonstrated on a variety of robot configurations including legged walkers, flying quadrotors and wheeled robots.
SMORES

The design of this system called SMORES (Self-assembling MOdular Robot for Extreme Shapeshifting) is capable of rearranging its modules in all three classes of reconfiguration; lattice style, chain style and mobile reconfiguration. Modules are independently mobile and are capable of self-assembly from a collection of disconnected modules.