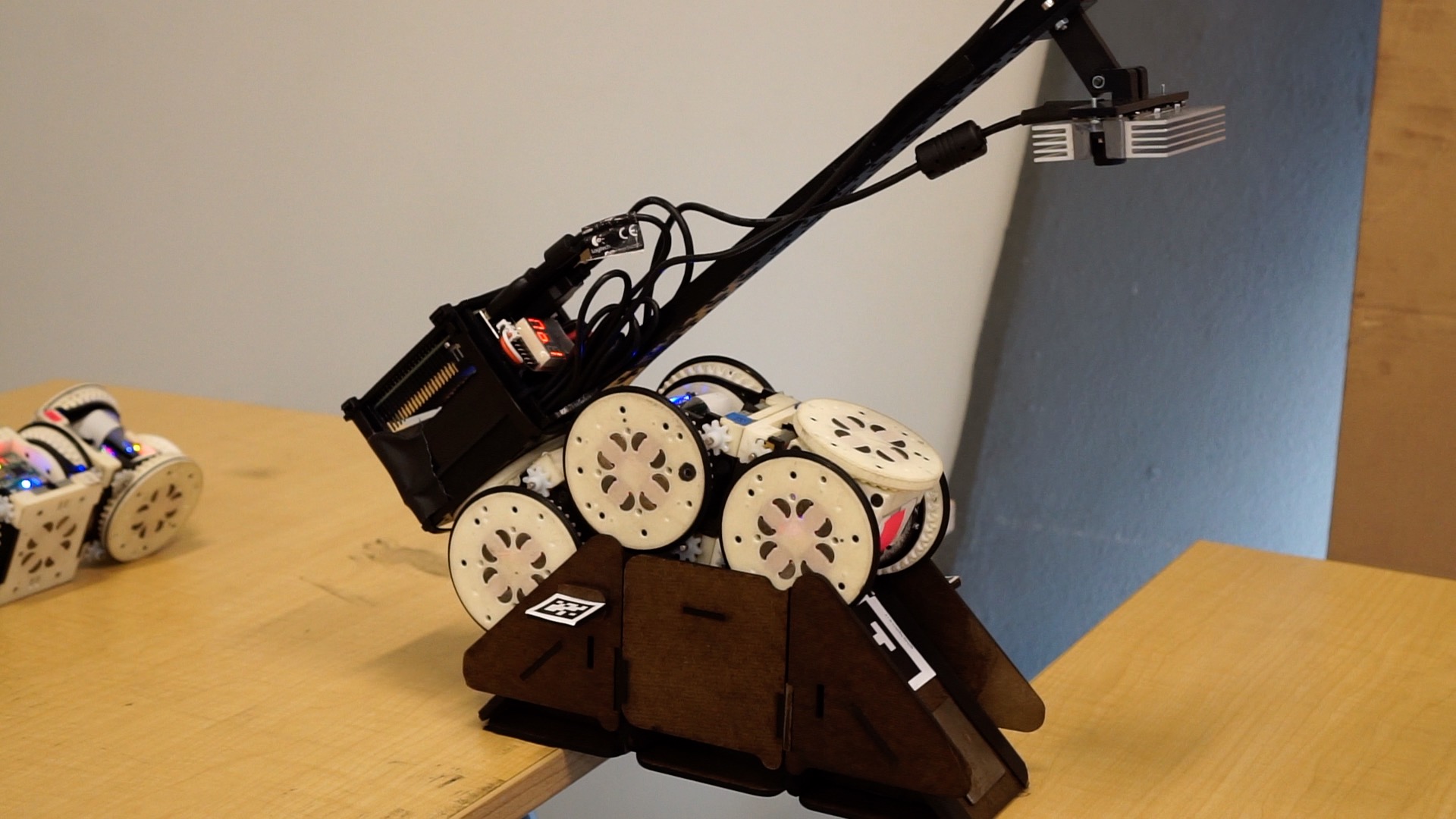
We present a system enabling a modular robot to autonomously build structures in order to accomplish high-level tasks. Building structures allows the robot to surmount large obstacles, expanding the set of tasks it can perform. This addresses a common weakness of modular robot systems, which often struggle to traverse large obstacles.
This paper presents the hardware, perception, and planning tools that comprise our system. An environment characterization algorithm identifies features in the environment that can be augmented to create a path between two disconnected regions of the environment. Specially-designed building blocks enable the robot to create structures that can augment the environment to make obstacles traversable. A high-level planner reasons about the task, robot locomotion capabilities, and environment to decide if and where to augment the environment in order to perform the desired task. We validate our system in hardware experiments.
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png) T. Tosun, J. Daudelin, G. Jing, H. Kress-Gazit, M. Campbell, and M. Yim, “Perception-informed autonomous environment augmentation with modular robots,” in Ieee international conference on robotics and automation, 2018.
T. Tosun, J. Daudelin, G. Jing, H. Kress-Gazit, M. Campbell, and M. Yim, “Perception-informed autonomous environment augmentation with modular robots,” in Ieee international conference on robotics and automation, 2018.
[Bibtex]@inproceedings{TT:JD:GJ:HK:MC:MY:icra:18, title={Perception-Informed Autonomous Environment Augmentation With Modular Robots}, author={Tosun, Tarik and Daudelin, Jonathan and Jing, Gangyuan and Kress-Gazit, Hadas and Campbell, Mark and Yim, Mark}, booktitle={IEEE International Conference on Robotics and Automation}, pdf={https://arxiv.org/abs/1710.01840}, year={2018} }
Pingback:ModLab UPenn » Archive » SMORES-EP
Pingback:SMORES-EP – Tarik Tosun
Pingback:shiping containers for sale | shiping container for sale | shiping container price | used shiping containers | 40 ft containers for sale near me | storage container | shipping container homes for sale | buy shipping container home | 20ft container for sal
Pingback:gray zone challenger
Pingback:เครื่องทำน้ำแข็ง
Pingback:sci/sci news/news sci/ science diyala
Pingback:รับจัดงานอีเว้นท์
Pingback:cam tokens
Pingback:Darknet Vendor
Pingback:gambia senegal
Pingback:altogel
Pingback:ทดลองเล่นสล็อต pg
Pingback:live chat
Pingback:เช่าห้องเก็บของ
Pingback:Massage
Pingback:Diyalaa
Pingback:ของพรีเมี่ยม
Pingback:นักสืบ
Pingback:ไฮเบย์
Pingback:Stream Super Bowl LIX
Pingback:Aviation Tire
Pingback:เว็บปั้มไลค์
Pingback:เว็บปั้มไลค์
Pingback:Happyluke สล็อตเว็บตรงแตกง่าย
Pingback:pigspin
Pingback:lotto888
Pingback:ยาระบายมะขามแขก
Pingback:Freshbet
Pingback:FORTUNE DRAGON
Pingback:นิยาย
Pingback:อัพเกรดไฟหน้ารถยนต์
Pingback:freshbet
Pingback:https://pneuhanzelka.cz/2025/02/17/casinodaddy-recap-of-sportsbet-io-casino-site-9/
Pingback:Confirm168 ทางเข้าเล่น แทงหวย 24 สมัคร สมาชิกออโต้
Pingback:สล็อตเว็บตรง pg slot
Pingback:เช็คสลิปโอนเงิน
Pingback:สั่งของจากจีน
Pingback:book fo ra
Pingback:serviços redes informática
Pingback:ไซด์ไลน์
Pingback:ninecasino
Pingback:ร้านดอกไม้ราชบุรี
Pingback:123bet เข้าสู่ระบบ
Pingback:Debelov