To take full advantage of the flexibility of a modular robot system, users must be able to create and verify new configurations and behaviors quickly. We have developed a design framework that facilitates rapid creation of new configurations and behaviors through composition of existing ones, and tools to verify configurations and behaviors as they are being created.
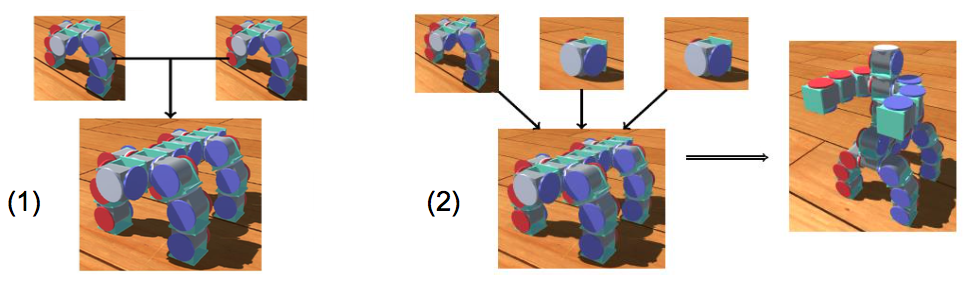
New configurations are created by combining existing sub-configurations, for example combining four legs and a body to create a walking robot. Behaviors are associated with each configuration, so that when sub-configurations are composed, their associated behaviors are immediately available for composition as well. We introduce a new motion description language (Series-Parallel Action Graphs) that facilitates the rapid creation of complex behaviors by composition of simpler behaviors. We provide tools that automatically verify configurations and behaviors during the design process, allowing the user to identify problems early and iterate quickly. In addition to verification, users can evaluate their configurations and behaviors in a physics-based simulator.
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png) T. Tosun, G. Jing, H. Kress-Gazit, and M. Yim, “Computer-aided compositional design and verification for modular robots,” in Ifrr international symposium on robotics research, 2015.
T. Tosun, G. Jing, H. Kress-Gazit, and M. Yim, “Computer-aided compositional design and verification for modular robots,” in Ifrr international symposium on robotics research, 2015.
[Bibtex]@inproceedings{TT:GJ:HK:MY:15, title={Computer-Aided Compositional Design and Verification for Modular Robots}, author={Tosun, Tarik and Jing, Gangyuan and Kress-Gazit, Hadas and Yim, Mark}, booktitle={IFRR International Symposium on Robotics Research}, year={2015}, pdf={http://modlabupenn.org/wp-content/uploads/tosunEtAl2015.pdf} }