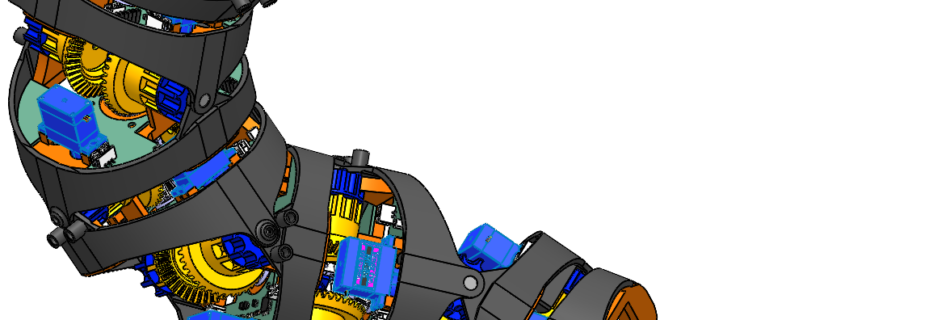
Multistability Enabled Passive Multiplexing in an n-DOF, Underactuated Hyper-Redundant Robot
New developments in robotics have allowed robots to become very small, and capable of completing tasks humans cannot. Current robots capable of achieving this are physically limited in how small they can be without compromising on other aspects such as sensing, strength, or complexity. Thus, we strive to understand how we can more compactly map …