Jimmy Paulos

Research Interests: Minimal Flying Vehicles
Office: Towne 170
Email: jpaulos@seas.upenn.edu
Personal Page
Publications
- W. Gosrich, S. Mayya, R. Li, J. Paulos, M. Yim, A. Ribeiro, and V. Kumar, “Coverage control in multi-robot systems via graph neural networks,” in 2022 international conference on robotics and automation (icra), 2022, p. 8787–8793.
[Bibtex]@inproceedings{gosrich2022coverage, title={Coverage control in multi-robot systems via graph neural networks}, author={Gosrich, Walker and Mayya, Siddharth and Li, Rebecca and Paulos, James and Yim, Mark and Ribeiro, Alejandro and Kumar, Vijay}, booktitle={2022 International Conference on Robotics and Automation (ICRA)}, pages={8787--8793}, year={2022}, organization={IEEE} } -
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png)
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) J. Paulos, B. Caraher, and M. Yim, “Emulating a fully actuated aerial vehicle using two actuators,” in 2018 ieee international conference on robotics and automation, Brisbane, Australia, 2018.
J. Paulos, B. Caraher, and M. Yim, “Emulating a fully actuated aerial vehicle using two actuators,” in 2018 ieee international conference on robotics and automation, Brisbane, Australia, 2018.
[Bibtex]@inproceedings{JP:BC:MY:18, title = {Emulating a Fully Actuated Aerial Vehicle using Two Actuators}, author={Paulos, James and Caraher, Bennet and Yim, Mark}, booktitle = {2018 IEEE International Conference on Robotics and Automation}, address = {Brisbane, Australia}, year = {2018}, doi={10.1109/ICRA.2018.8462975}, pdf={https://www.modlabupenn.org/wp-content/uploads/2018/05/paulos_emulating_ICRA_2018.pdf} } - J. Paulos and M. Yim, “Cyclic blade pitch control without a swashplate for small helicopters,” Journal of guidance, control, and dynamics, vol. 41, iss. 3, p. 689–700, 2018.
[Bibtex]@article{JP:MY:18, title={Cyclic Blade Pitch Control Without a Swashplate for Small Helicopters}, author={Paulos, James and Yim, Mark}, journal={Journal of Guidance, Control, and Dynamics}, volume={41}, number={3}, pages={689--700}, year={2018}, publisher={American Institute of Aeronautics and Astronautics}, doi={10.2514/1.G002683}, pdf={https://www.modlabupenn.org/wp-content/uploads/2018/05/paulos_cyclic_blade_pitch_JGCD_2018.pdf} } - J. Paulos and M. Yim, “Scalability of cyclic control without blade pitch actuators,” in Aiaa atmospheric flight mechanics conference, aiaa scitech forum, 2018.
[Bibtex]@inproceedings{JP:MY:18, title={Scalability of Cyclic Control without Blade Pitch Actuators}, author={Paulos, James and Yim, Mark}, booktitle={AIAA Atmospheric Flight Mechanics Conference, AIAA SciTech Forum}, year={2018}, doi={10.2514/6.2018-0532}, pdf={https://www.modlabupenn.org/wp-content/uploads/2018/03/paulos_scalability_of_cyclic_AIAA_2018.pdf} } - J. Paulos and M. Yim, “Cyclic blade pitch control for small uav without a swashplate,” in Aiaa atmospheric flight mechanics conference, aiaa scitech forum, 2017.
[Bibtex]@inproceedings{JP:MY:17, title={Cyclic Blade Pitch Control for Small UAV Without a Swashplate}, author={Paulos, James and Yim, Mark}, booktitle={AIAA Atmospheric Flight Mechanics Conference, AIAA SciTech Forum}, year={2017}, doi={10.2514/6.2017-1186} } - J. Paulos, N. Eckenstein, T. Tosun, J. Seo, J. Davey, J. Greco, V. Kumar, and M. Yim, “Automated self-assembly of large maritime structures by a team of robotic boats,” Automation science and engineering, ieee transactions on, vol. 12, iss. 3, pp. 958-968, 2015.
[Bibtex]@ARTICLE{JP:NE:TT:JS:JD:JG:VK:MY:15, author={Paulos, J. and Eckenstein, N. and Tosun, T. and Seo, J. and Davey, J. and Greco, J. and Kumar, V. and Yim, M.}, journal={Automation Science and Engineering, IEEE Transactions on}, title={Automated Self-Assembly of Large Maritime Structures by a Team of Robotic Boats}, year={2015}, month={July}, volume={12}, number={3}, pages={958-968}, keywords={Assembly;Boats;Computers;Planning;Robots;Trajectory;Winches;Autonomous surface craft;modular construction;modular robot;multirobot systems;self-assembly;self-reconfigurable}, doi={10.1109/TASE.2015.2416678}, pdf={http://modlabupenn.org/wp-content/uploads/paulos_automated_self_assembly_TASE_2015.pdf}, ISSN={1545-5955} } - J. Paulos and M. Yim, “Flight performance of a swashplateless micro air vehicle,” in Robotics and automation (icra), 2015 ieee international conference on, 2015, pp. 5284-5289.
[Bibtex]@INPROCEEDINGS{JP:MY:15, author={Paulos, James and Yim, Mark}, booktitle={Robotics and Automation (ICRA), 2015 IEEE International Conference on}, title={Flight Performance of a Swashplateless Micro Air Vehicle}, year={2015}, month={May}, pages={5284-5289}, keywords={Attitude control;Blades;Brushless motors;Helicopters;Propellers;Rotors;Vehicles}, doi={10.1109/ICRA.2015.7139936}, pdf={http://modlabupenn.org/wp-content/uploads/paulos_flight_performance_ICRA_2015.pdf} } - I. O’Hara, J. Paulos, J. Davey, N. Eckenstein, N. Doshi, T. Tosun, J. Greco, J. Seo, M. Turpin, V. Kumar, and M. Yim, “Self-assembly of a swarm of autonomous boats into floating structures,” in 2014 ieee international conference on robotics and automation (icra 2014), 2014.
[Bibtex]@INPROCEEDINGS{IO:JP:JD:NE:ND:TT:JG:JS:MT:VK:MY:14:5, author={O'Hara, Ian and Paulos, James and Davey, Jay and Eckenstein, Nick and Doshi, Neel and Tosun, Tarik and Greco, Jonathan and Seo, Jungwon and Turpin, Matt and Kumar, Vijay and Yim, Mark}, booktitle={2014 IEEE International Conference on Robotics and Automation (ICRA 2014)}, title={Self-Assembly of a Swarm of Autonomous Boats into Floating Structures}, doi={10.1109/ICRA.2014.6907011}, year={2014}, month={June}, pdf={http://modlabupenn.org/wp-content/uploads/ieee_copyright_overlay_dtemp.pdf}, } - J. Paulos and M. Yim, “An underactuated propeller for attitude control in micro air vehicles,” in Intelligent robots and systems (iros), 2013 ieee/rsj international conference on, Tokyo, Japan, 2013.
[Bibtex]@INPROCEEDINGS{JP:MY:13, author={Paulos, James and Yim, Mark}, booktitle={Intelligent Robots and Systems (IROS), 2013 IEEE/RSJ International Conference on}, title={An Underactuated Propeller for Attitude Control in Micro Air Vehicles}, year={2013}, address={Tokyo, Japan}, month={November}, doi={10.1109/IROS.2013.6696528}, pdf={http://modlabupenn.org/wp-content/uploads/paulos_an_underactuated_propeller_IROS_2013.pdf}, }
Projects
American Helicopter Society Student MAV Challenge 2015

We have developed a low-cost, lightweight coaxial-rotor MAV capable of full attitude control using just two actuators. The vehicle provides real-time telemetry and high-quality video to a ground station which can be used to remotely pilot the vehicle. The design integrates the underactuated rotor system developed in the lab with parts of cheap helicopter toys …
Read more "American Helicopter Society Student MAV Challenge 2015"
Underactuated Rotor for Simple Micro Air Vehicles
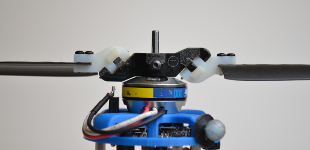
We extract thrust, roll, and pitch authority from a single propeller and single motor through an underactuated mechanism embedded in the rotor itself. This allows new types of conventionally-capable micro air vehicles now requiring only two motors. This contrasts with the servos and linkages of conventional helicopters or the four drive motors in quadrotors.
Tactically Expandable Maritime Platform (T.E.M.P.)
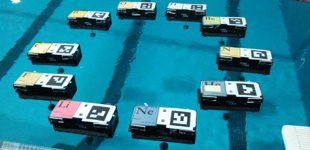
We have built a system of shipping container sized robotic boats that can hook onto each other. We demonstrate the conceptual design of a system that is capable of constructing bridges and various shaped islands that can be made compliant to waves.