In nature it is very common for insects to work together in collaboration to achieve formation of structures such as bridges, platforms and other configurations. There is no centralized command that determines each individual’s motions, forces and connections, once each one of them determines its own behavior locally. A flying modular platform called ModQuad was shown to assemble in midair and cooperatively fly as a larger structure.

Scaling modular robots is a very challenging problem that usually limits the benefits of modularity. The sum of the performance metrics (speed, torque, precision etc.) from each module usually does not scale at the same rate as the conglomerate physical properties. In particular, for ModQuad, saturation from individual motors would increase as the structures became larger leading to failure and instability. In specific configurations were not capable to maintain stable flight due to the lack of control authority especially for yaw motions as more modules were connected to the current flying structure. In the control of the flying structures with quadrotor-like architectures, yaw has been shown to be an issue especially as more actuators are added. When conglomerate systems scale up in the number of modules, the moment of inertia of the conglomerate often grows faster than the increase in thrust capability for each module.
In this work, we propose a new module design that enables an added degree of freedom roll motion between joined modules in a conglomerate.
ModQuad-DoF Design
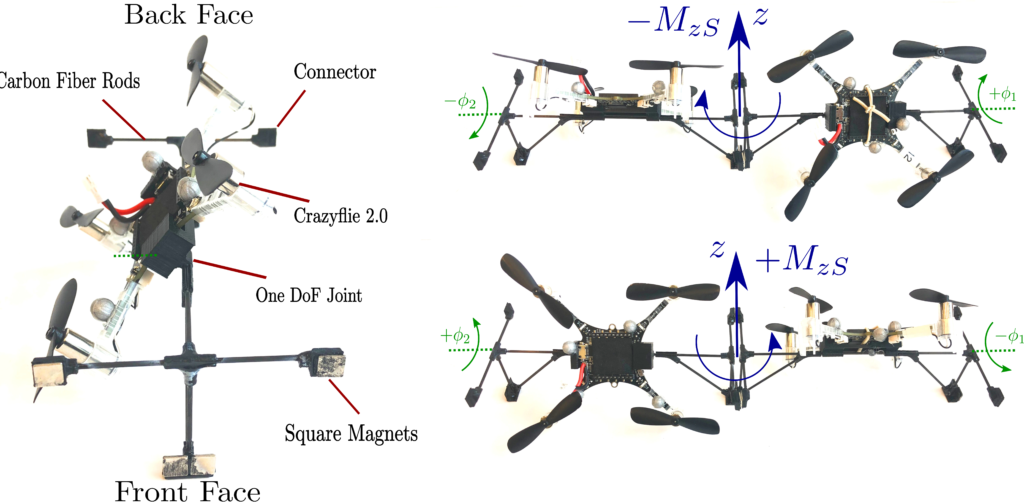
The Crazyflie 2.0 is the chosen platform to enable thrust and attitude to the individual modules. The flying vehicle measures 92×92×29 mm and weights 27 g while its battery lasts around 4 minutes for the novel design proposed. In this work the cage performs as pendulum relative to the flying vehicle. The quadrotor is joined to the cage through a one DOF joint. The cages are made of light-weight materials: ABS for the 3-D printed connectors and joints, and carbon fiber for the rods. The new system design allows the cage to behave as a passive pendulum relative to the quadrotor. The choice to enable docking only on the back and front faces was a design decision to minimize the cage total weight. Docking enabled on all four faces would require more material at a further distance from the pendulum axis of rotation relative to the flying vehicle. This could introduce more inertia to the system and disturbance that the robot could not reject.
Conclusion
We introduce ModQuad-DoF, a flying modular robotic structure whose yaw actuation scales with increased numbers of modules. ModQuad-DoF has a one DOF jointed cage design and a novel control method for the flying structure. Our new yaw actuation method was validated conducting experiments for hovering conditions. We were able to perform two, four and, six modules cooperatively flying in a line with yaw controllability and reduced loss in thrust. In future work we aim to explore the structure controllability with more robots in a line configuration, and exploring different solutions for the desired roll angles.
Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png) B. Gabrich, G. Li, and M. Yim, “Modquad-dof: a novel yaw actuation for modular quadrotors,” in Ieee international conference on robotics and automation 2020, to be presented, Paris, France, 2020.
B. Gabrich, G. Li, and M. Yim, “Modquad-dof: a novel yaw actuation for modular quadrotors,” in Ieee international conference on robotics and automation 2020, to be presented, Paris, France, 2020.
[Bibtex]@inproceedings{BG:GL:MY:20, title = {ModQuad-DoF: A Novel Yaw Actuation for Modular Quadrotors}, author = {Gabrich, Bruno and Li, Guanrui and Yim, Mark}, booktitle = {IEEE International Conference on Robotics and Automation 2020, to be presented}, address = {Paris, France}, year = {2020}, pdf={https://www.modlabupenn.org/wp-content/uploads/2020/03/gabrich_modquad_dof_icra2020.pdf} }
This mechanism looks interesting with multiple quads.
Checkout a similar actuation mechanism for yaw control for a quadrotor tailsitter.
http://arc.aiaa.org/doi/abs/10.2514/1.G004697
Pingback:jazz music
Pingback:trap
Pingback:calm jazz
Pingback:cozy coffee shop
Pingback:bossa nova cafe
Pingback:Ozempic zu verkaufen
Pingback:dummy vapes
Pingback:เค้กสตอเบอรี่
Pingback:실시간 바카라사이트
Pingback:dayz cheats
Pingback:รักษาสิว
Pingback:รถรับส่งสนามบินในญี่ปุ่น
Pingback:slot online สายปั่นห้ามพลาด
Pingback:cam promo
Pingback:ไอศกรีม
Pingback:สอนภาษาไทยให้ชาวต่างชาติ
Pingback:live cams
Pingback:เฟอร์นิเจอร์สไตล์มินิมอล
Pingback:โคมไฟ
Pingback:รับนำเข้าสินค้าจากจีน
Pingback:beautiful women
Pingback:ไฮเบย์
Pingback:โคมโรงงาน
Pingback:cam sites
Pingback:HUAYYIM
Pingback:betflix wallet
Pingback:สล็อตออนไลน์เกาหลี
Pingback:Aviator
Pingback:KC9 คาสิโนออนไลน์ อันดับ 1
Pingback:Homepage
Pingback:Aviator bet
Pingback:pigspin
Pingback:รับติดตั้งระบบระบายอากาศ
Pingback:Ricky Casino
Pingback:Freshbet
Pingback:เพิ่มการมองเห็น
Pingback:ricky casino
Pingback:ufabet777
Pingback:rich89bet
Pingback:ดูบอลสด888
Pingback:Japan Auction Sheet Verification
Pingback:instant crypto exchange no kyc
Pingback:ติดเน็ต ais
Pingback:แฟนเช่า