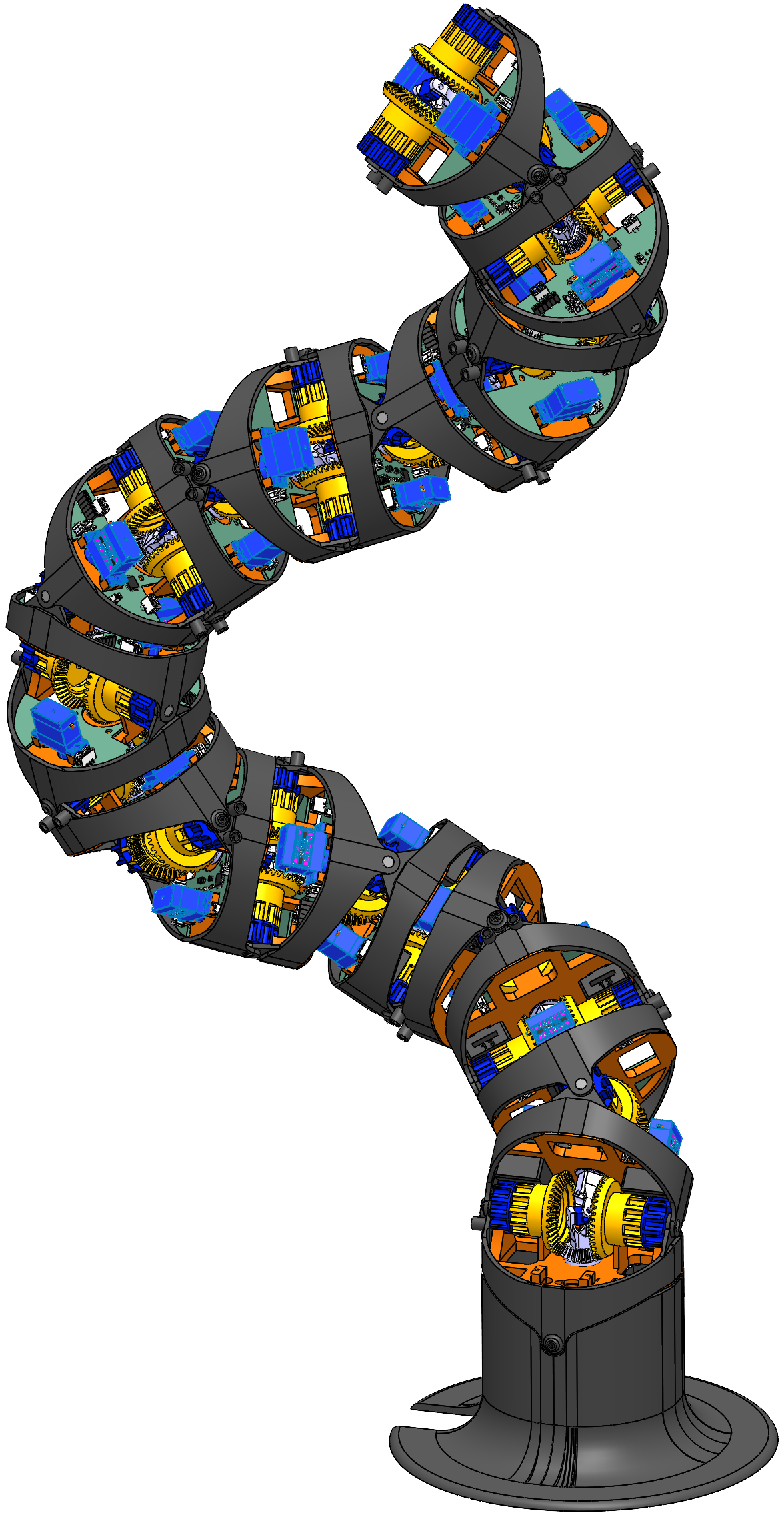
Highly articulated manipulators offer shape adaptability and access to confined environments, but practical implementations remain limited by actuator placement, payload constraints, and mechanical complexity. We present CHAMPS, a configurable, highly articulated serial-chain modular robot driven by a single drive actuator with selective joint engagement. Motion is generated by distributing a common drive rotation to subsets of joints through a discrete locking mechanism embedded in each module.
We describe the mechanical and electrical design, actuation principle, and locking architecture, and derive a kinematic model specialized to the alternating joint geometry. Workspace characteristics are analyzed through forward-kinematics sampling, highlighting geometric asymmetries introduced by joint orientation. The actuation constraint imposed by shared drive magnitude is formalized using a lock-state vector representation, revealing that arbitrary joint configurations must be executed as sequences of motion segments separated by discrete lock transitions. The influence of drive stop count on execution smoothness is demonstrated. We demonstrate the motion and torque output capabilities of our design experimentally using an assembled five-module mounted chain. These results establish a foundation for scalable, modular design and kinematic control of single drive actuator hyper-redundant manipulators.
Pingback:levitra generic