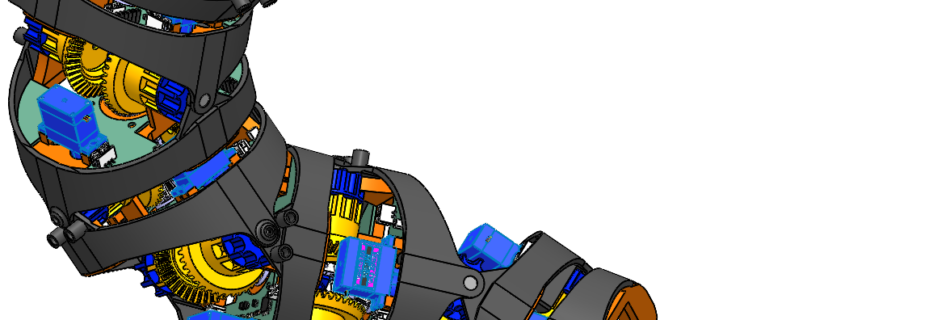
Design and Kinematics of CHAMPS: a Configurable, Highly-Articulated, Multi-Purpose Snake
CHAMPS is a configurable, highly articulated modular manipulator driven by a single actuator with selective joint engagement. The design combines shared actuation, embedded locking, and alternating joint geometry to enable scalable hyper-redundant motion.