Grasping objects is a hard task that usually implies a dedicated mechanism (e.g arm, gripper) to the robot. Instead of adding extra components, have you thought about embedding the grasping capability to the robot itself? Have you also thought about whether we could do it flying?
In the GRASP Laboratory at the University of Pennsylvania, we are concerned about controlling robots to perform useful tasks. In this work, we present the Flying Gripper! It is a novel flying modular platform capable of grasping and transporting objects with the help of multiple quadrotors (crazyflies) working together. This research project is coordinated by Professor Mark Yim and Professor Vijay Kumar, and led by Bruno Gabrich (PhD candidate) and David Saldaña (Postdoctoral researcher).

Inspiration in Nature
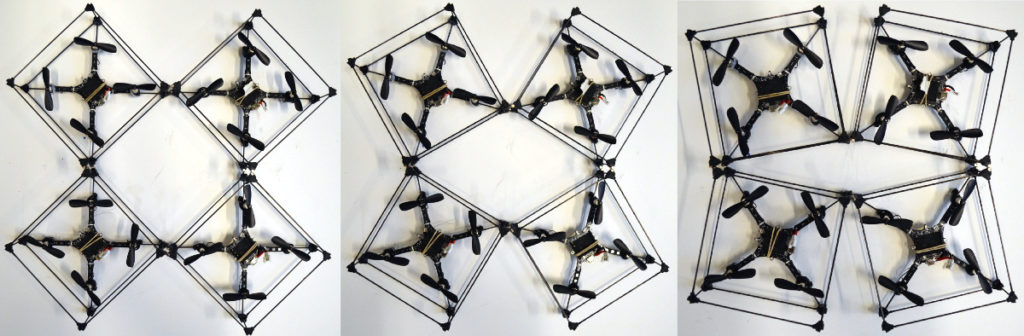
In nature, cooperative work allows small insects to manipulate and transport objects often heavier than the individuals. Unlike the collaboration in the ground, collaboration in air is more complex especially considering flight stability. With this inspiration, we developed a platform composed of four cooperative identical modules where each is based on a quadrotor (crazyflies) within a cuboid frame with a docking mechanism. Pair of modules are able to fly independently and physically connect by matching their vertical edges forming a hinge. Four one degree of freedom (DOF) connections results in a one DOF four-bar linkage that can be used to grasp external objects. With this platform we are able to change the shape of the flying vehicle during flight and use its own body to constrain and grasp an object.
Flying Gripper Design and Motion
In the proposed modular platform, we use the Crazyflie 2.0. Its battery life lasts around seven minutes, though in our case battery life time is reduced due to the extra weight. The motor mounting was modified from the standard design, we tilted the rotors 15 degrees. This was necessary as more yaw authority was required to enable grasping as a four-bar. However, adding this tilt reduces the lifting thrust by 3%. Axially aligned cylindrical Neodymium Iron Boron (Nd-FeB) magnets, with 1/8″ of diameter and 1/4″ of thickness are mounted on each corner enabling edge-to-edge connections. The cylindrical magnets have mass of 0.377g and are able to generate a force of 0.4 kg in a tangential connection between two of the same magnets. This forms a strong bond when two modules connect in flight. Note that the connections are not rigid – each forms a one DOF hinge.

The four attached modules results in a one DOF four bar linkage in addition to the combined position and attitude of the conglomerate. The four-bar internal angles are controlled by controlling the yaw attitude of each module. For example, two modules rotate clockwise and other two modules rotate counter-clockwise in a coordinated manner.
Grasping Objects
Collaborative manipulation in air is an alternative to reduce the complexity of adding manipulator arms to flying vehicles. In the following video we are able to see the Flying Gripper changing its shape in midair to accomplish the complex task of grasping a wished coffee cup. Would you like some coffee delivery?
Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png) B. Gabrich, D. Saldana, V. Kumar, and M. Yim, “A flying gripper based on cuboid modular robots,” in Ieee international conference on robotics and automation 2018, Brisbane, Australia, 2018.
B. Gabrich, D. Saldana, V. Kumar, and M. Yim, “A flying gripper based on cuboid modular robots,” in Ieee international conference on robotics and automation 2018, Brisbane, Australia, 2018.
[Bibtex]@inproceedings{BG:DS:VK:MY:18, title = {A Flying Gripper Based on Cuboid Modular Robots}, author = {Gabrich, Bruno and Saldana, David and Kumar, Vijay and Yim, Mark}, booktitle = {IEEE International Conference on Robotics and Automation 2018}, address = {Brisbane, Australia}, year = {2018}, pdf={https://www.modlabupenn.org/wp-content/uploads/2018/03/gabrich_modquad_gripper_icra2018.pdf} }
Pingback:Kel Tec Pistols
Pingback:is cannabis legal in gdansk
Pingback:hit789
Pingback:jaxx download
Pingback:สล็อตออนไลน์ เว็บตรงไม่ผ่านเอเย่นต์
Pingback:ทางเข้าpg
Pingback:lsm99 เว็บสล็อตออนไลน์
Pingback:ไม้กั้นรถยนต์
Pingback:weed in cannes
Pingback:สลากกินแบ่งรัฐบาล หรือ หวยรัฐบาลไทย
Pingback:แทงบอลสูงต่ำ
Pingback:นักสืบ
Pingback:สล็อตออนไลน์เกาหลี
Pingback:joker369
Pingback:highbay
Pingback:Aviation Tire
Pingback:pigspin
Pingback:โคมไฟ
Pingback:สล็อต888
Pingback:Werewolf\'s Hunt
Pingback:ที่พักศรีราชา
Pingback:gubet
Pingback:empresa apoio informático lisboa
Pingback:0123movie
Pingback:ดูแลผู้สูงอายุ
Pingback:ศัลยกรรมตาสองชั้น
Pingback:พลาสติกปูพื้นก่อนเทคอนกรีต
Pingback:123bet login
Pingback:iTunes gift card
Pingback:ระบบจัดการออเดอร์
Pingback:Aviator
Pingback:บาคาร่าเกาหลี
Pingback:ล้างแอร์
Pingback:Entrepreneur Debelov
Pingback:av
Pingback:jp slot wild heist cas
Pingback:mk8
Pingback:78win
Pingback:casinozeusonline casino en vivo
Pingback:พูลวิลล่านครนายก
Pingback:free ig followers and likes
Pingback:สั่งของจากจีน
Pingback:ไดเรกทอรีธุรกิจในประเทศไทย
Pingback:ร้านขายรหัส Valorant
Pingback:ทดลองเล่นสล็อต
Pingback:หวยเฮง789