The EP-Face Connector
We present the EP-Face connector, a novel connector for hybrid chain-lattice type modular robots that is high- strength (88.4N), compact, fast, power efficient, and robust to position errors.
We present the EP-Face connector, a novel connector for hybrid chain-lattice type modular robots that is high- strength (88.4N), compact, fast, power efficient, and robust to position errors.
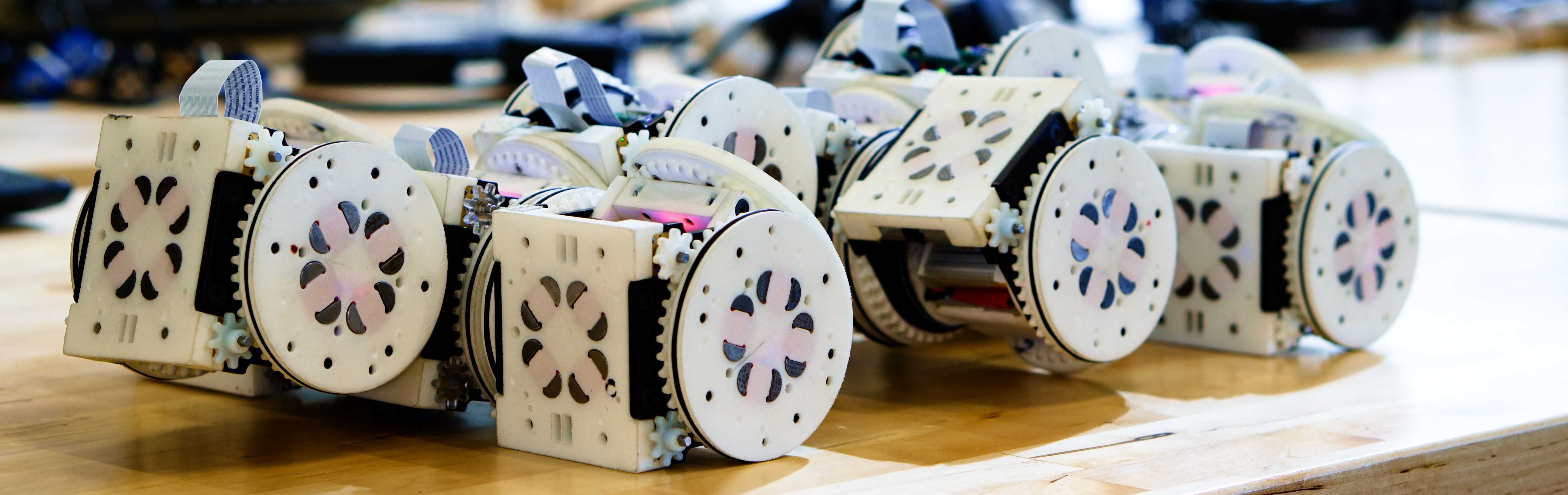
SMORES-EP is a modular robot designed and built at the University of Pennsylvania, and used by researchers at Penn and Cornell. SMORES stands for Self-Assembling MOdular Robot for Extreme Shapeshifting, and EP refers to the Electro-Permanent magnets the modules use to connect.
Our mobile telepresence robot is fitted with a robotic manipulator that will allow a person to virtually manipulate the avatar environment. We have shown our robot called “Persona” to be capable of moving up and down ramps, use elevators, manipulate objects such as chess pieces, and to lift and transport loads up to 4.5 kg.