Jonathan Greco

Research Interests: Cable Mechanisms, Little Robots to move Big Things, DARPA DRC
Office: Towne 170
Email: jongreco at seas.upenn.edu
Personal Page
Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png)
![[DOI]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/external.png) J. Paulos, N. Eckenstein, T. Tosun, J. Seo, J. Davey, J. Greco, V. Kumar, and M. Yim, “Automated self-assembly of large maritime structures by a team of robotic boats,” Automation science and engineering, ieee transactions on, vol. 12, iss. 3, pp. 958-968, 2015.
J. Paulos, N. Eckenstein, T. Tosun, J. Seo, J. Davey, J. Greco, V. Kumar, and M. Yim, “Automated self-assembly of large maritime structures by a team of robotic boats,” Automation science and engineering, ieee transactions on, vol. 12, iss. 3, pp. 958-968, 2015.
[Bibtex]@ARTICLE{JP:NE:TT:JS:JD:JG:VK:MY:15, author={Paulos, J. and Eckenstein, N. and Tosun, T. and Seo, J. and Davey, J. and Greco, J. and Kumar, V. and Yim, M.}, journal={Automation Science and Engineering, IEEE Transactions on}, title={Automated Self-Assembly of Large Maritime Structures by a Team of Robotic Boats}, year={2015}, month={July}, volume={12}, number={3}, pages={958-968}, keywords={Assembly;Boats;Computers;Planning;Robots;Trajectory;Winches;Autonomous surface craft;modular construction;modular robot;multirobot systems;self-assembly;self-reconfigurable}, doi={10.1109/TASE.2015.2416678}, pdf={http://modlabupenn.org/wp-content/uploads/paulos_automated_self_assembly_TASE_2015.pdf}, ISSN={1545-5955} } - I. O’Hara, J. Paulos, J. Davey, N. Eckenstein, N. Doshi, T. Tosun, J. Greco, J. Seo, M. Turpin, V. Kumar, and M. Yim, “Self-assembly of a swarm of autonomous boats into floating structures,” in 2014 ieee international conference on robotics and automation (icra 2014), 2014.
[Bibtex]@INPROCEEDINGS{IO:JP:JD:NE:ND:TT:JG:JS:MT:VK:MY:14:5, author={O'Hara, Ian and Paulos, James and Davey, Jay and Eckenstein, Nick and Doshi, Neel and Tosun, Tarik and Greco, Jonathan and Seo, Jungwon and Turpin, Matt and Kumar, Vijay and Yim, Mark}, booktitle={2014 IEEE International Conference on Robotics and Automation (ICRA 2014)}, title={Self-Assembly of a Swarm of Autonomous Boats into Floating Structures}, doi={10.1109/ICRA.2014.6907011}, year={2014}, month={June}, pdf={http://modlabupenn.org/wp-content/uploads/ieee_copyright_overlay_dtemp.pdf}, }
Projects
DARPA DRC Trials

The DARPA Robotics Challenge (DRC) is a competition sponsored by DARPA to encourage rapid, innovative development in the field of humanoid robotics. Modlab participated with Penn as a part of Team THOR and Dr. Lee's lab, in an alliance with Virginia Tech, Robotis Inc, and Harris Corp. The Trials were held from Dec 20-21, 2013, with sixteen teams each providing a robot to complete eight tasks designed to simulate disaster recovery scenarios.
Little Robots to move Big Things

The Little Robots to move Big Things project is motivated by the paradigm in modern robotics that most robots are incapable of manipulating objects that are even a small proportion of the robot's mass. This project seeks to overturn this trend by using small robots to create large forces by leveraging the reaction forces created through interactions with fixed objects in the workspace.
Tactically Expandable Maritime Platform (T.E.M.P.)
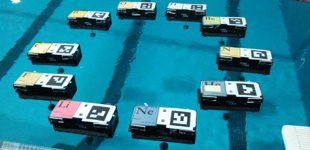
We have built a system of shipping container sized robotic boats that can hook onto each other. We demonstrate the conceptual design of a system that is capable of constructing bridges and various shaped islands that can be made compliant to waves.