Chaitanya Bhargava

Position: Master's Student
Research Interests: Low-cost Laser Range Finder, Persona
Office: Modlab
Email: cbhar at seas.upenn.edu
Personal Page
Research Interests: Low-cost Laser Range Finder, Persona
Office: Modlab
Email: cbhar at seas.upenn.edu
Personal Page
Publications
Projects
Low-cost Laser Range Finder

The goal for this project is to make a low-cost but high-speed , very small and reliable laser range finder. The idea is to talk to a small camera, and obtain the laser line position and send out the data line by line in real-time.
Persona
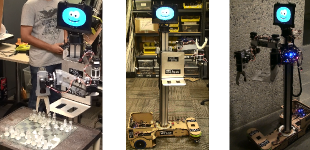
Our mobile telepresence robot is fitted with a robotic manipulator that will allow a person to virtually manipulate the avatar environment. We have shown our robot called "Persona" to be capable of moving up and down ramps, use elevators, manipulate objects such as chess pieces, and to lift and transport loads up to 4.5 kg.