Bruno Gabrich

Research Interests: ModQuad, Modular Robots, Flying Vehicles, Docking, Manipulation
Office: Perch , Pennovation Center
Email: brunot@seas.upenn.edu
Personal Page
Linkedin ResearchGate I am a PhD student in ModLab , part of the GRASP Lab, at the University of Pennsylvania and I am also the Group's Social Chair. I am originally from Belo Horizonte, Brazil and obviously passionate about soccer. Whenever I can I am watching Brazilian team Cruzeiro to play . I graduated with honor in Mechanical Engineering from the Pontifical Catholic University of Minas Gerais (Brazil) with a period of one year as an exchange student at The Pennsylvania State University. Prior to coming to Penn, I worked at CoRIS Institute at Oregon State University and also at Fiat Chyrsler Automobiles Latin America at the Electronics Engineering. My current research about Modular Flying Robots is a collaboration with Vijay Kumar Lab
Publications
-
![[PDF]](https://www.modlabupenn.org/wp-content/plugins/papercite/img/pdf.png) B. Gabrich, D. Saldana, and M. Yim, “Finding structure configurations for flying modular robots,” in Ieee/rsj international conference on intelligent robots and systems 2021, to be presented, Czech Republic, Prague, 2021.
B. Gabrich, D. Saldana, and M. Yim, “Finding structure configurations for flying modular robots,” in Ieee/rsj international conference on intelligent robots and systems 2021, to be presented, Czech Republic, Prague, 2021.
[Bibtex]@inproceedings{BG:DS:MY:21, title = {Finding Structure Configurations for Flying Modular Robots}, author = {Gabrich, Bruno and Saldana, David and Yim, Mark}, booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems 2021, to be presented}, address = {Czech Republic, Prague}, year = {2021}, pdf={https://www.modlabupenn.org/wp-content/uploads/2021/08/iros2021_brunogabrich_modlab.pdf} } - B. Gabrich, G. Li, and M. Yim, “Modquad-dof: a novel yaw actuation for modular quadrotors,” in Ieee international conference on robotics and automation 2020, to be presented, Paris, France, 2020.
[Bibtex]@inproceedings{BG:GL:MY:20, title = {ModQuad-DoF: A Novel Yaw Actuation for Modular Quadrotors}, author = {Gabrich, Bruno and Li, Guanrui and Yim, Mark}, booktitle = {IEEE International Conference on Robotics and Automation 2020, to be presented}, address = {Paris, France}, year = {2020}, pdf={https://www.modlabupenn.org/wp-content/uploads/2020/03/gabrich_modquad_dof_icra2020.pdf} } - G. Li, B. Gabrich, D. Saldana, J. Das, V. Kumar, and M. Yim, “Modquad-vi: a vision-based self-assembling modular quadrotor,” in Ieee international conference on robotics and automation 2019, Montreal, Canada, 2019.
[Bibtex]@inproceedings{GL:BG:DS:JD:VK:MY:19, title = {ModQuad-Vi: A Vision-Based Self-Assembling Modular Quadrotor}, author = {Li, Guanrui and Gabrich, Bruno and Saldana, David and Das, Jnaneshwar and Kumar, Vijay and Yim, Mark}, booktitle = {IEEE International Conference on Robotics and Automation 2019}, address = {Montreal, Canada}, year = {2019}, pdf={https://www.modlabupenn.org/wp-content/uploads/2019/03/li_gabrich_saldana_modquadvi.pdf} } - B. Gabrich, D. Saldana, V. Kumar, and M. Yim, “A flying gripper based on cuboid modular robots,” in Ieee international conference on robotics and automation 2018, Brisbane, Australia, 2018.
[Bibtex]@inproceedings{BG:DS:VK:MY:18, title = {A Flying Gripper Based on Cuboid Modular Robots}, author = {Gabrich, Bruno and Saldana, David and Kumar, Vijay and Yim, Mark}, booktitle = {IEEE International Conference on Robotics and Automation 2018}, address = {Brisbane, Australia}, year = {2018}, pdf={https://www.modlabupenn.org/wp-content/uploads/2018/03/gabrich_modquad_gripper_icra2018.pdf} } - D. Saldana, B. Gabrich, G. Li, M. Yim, and V. Kumar, “Modquad: the flying strucuture that self-assembles in midair,” in Ieee international conference on robotics and automation 2018, Brisbane, Australia, 2018.
[Bibtex]@inproceedings{DS:BG:LG:MY:VK:18, title = {ModQuad: The Flying Strucuture that Self-Assembles in Midair}, author = {Saldana, David and Gabrich, Bruno and Li, Guanrui and Yim, Mark and Kumar, Vijay}, booktitle = {IEEE International Conference on Robotics and Automation 2018}, address = {Brisbane, Australia}, year = {2018}, pdf={https://www.modlabupenn.org/wp-content/uploads/2018/03/gabrich_modquad_icra2018.pdf} } - D. Saldana, B. Gabrich, M. Whitzer, A. Prorok, M. F. M. Campos, M. Yim, and V. Kumar, “A decentralized algorithm for assembling structures with modular robots,” in 2017 ieee/rsj international conference on intelligent robots and systems (iros), Vancouver, Canada, 2017.
[Bibtex]@inproceedings{DS:BG:MW:AM:MFMC:MY:VK:17, title = {A Decentralized Algorithm for Assembling Structures with Modular Robots}, author = {Saldana, David and Gabrich, Bruno and Whitzer, Mickey and Prorok, Amanda and Campos, Mario F.M. and Yim, Mark and Kumar, Vijay}, booktitle = {2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, address = {Vancouver, Canada}, year = {2017}, pdf={https://www.modlabupenn.org/wp-content/uploads/2017/07/Saldana_Gabrich_decentralized_algorithm_IROS_2017.pdf.pdf} } - B. T. Gabrich, L. N. Assis, A. M. de Morais, and J. R. Sodré, “Study of the throtle valve flow rate to adapt a diesel engine for operation with ethanol,” in Sae international congress, São Paulo, Brazil, 2014.
[Bibtex]@inproceedings{BG:LS:AM:JS:14, title = {Study of the throtle valve flow rate to adapt a diesel engine for operation with ethanol}, author = {Gabrich, Bruno Teles and Assis, Lucas Nogueira and de Morais, André Marcelino and Sodré, José Ricardo}, booktitle = {SAE International Congress}, address = {São Paulo, Brazil}, year = {2014}, pdf={} }
Projects
Finding Structure Configurations for Flying Modular Robots
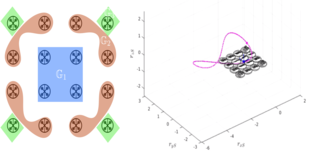
Flying Modular Structures offer a versatile mechanism that can change the arrangement of constituent actuators according to task requirements. In this work, we extend a modular aerial platform that can expand its actuation capabilities depending on the configuration. Each module is composed of a quadrotor in a cage that can rigidly connect with other modules. …
Read more "Finding Structure Configurations for Flying Modular Robots"
ModQuad-DoF: A Novel Yaw Actuation for Modular Quadrotors

In nature it is very common for insects to work together in collaboration to achieve formation of structures such as bridges, platforms and other configurations. There is no centralized command that determines each individual’s motions, forces and connections, once each one of them determines its own behavior locally. A flying modular platform called ModQuad was …
Read more "ModQuad-DoF: A Novel Yaw Actuation for Modular Quadrotors"
ModQuad-Vi: A Vision-Based Self-Assembling Modular Quadrotor
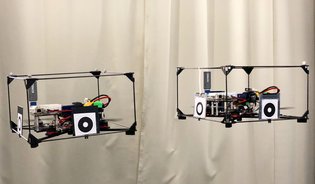
Flying modular robots have the potential to rapidly form temporary structures. In the literature, docking actions rely on external systems and indoor infrastructures for relative pose estimation. In contrast to related work, we provide local estimation during the self-assembly process to avoid dependency on external systems. In this paper, we introduce ModQuad-Vi, a flying …
Read more "ModQuad-Vi: A Vision-Based Self-Assembling Modular Quadrotor"
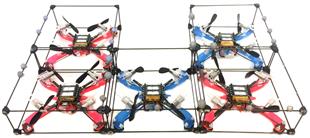
A Flying Gripper Based on Cuboid Modular Robots

Grasping objects is a hard task that usually implies a dedicated mechanism (e.g arm, gripper) to the robot. Instead of adding extra components, have you thought about embedding the grasping capability to the robot itself? Have you also thought about whether we could do it flying? In the GRASP Laboratory at the University of Pennsylvania, …
ModQuad: The Flying Structure that Self-Assembles in Midair
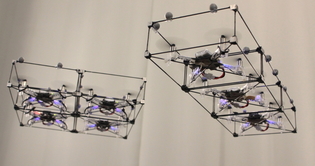
Modular robots can adapt and offer solutions in emergency scenarios, but self-assembling on the ground is a slow process. What about self-assembling in midair? In one of our recent work in GRASP Laboratory at University of Pennsylvania, we introduce ModQuad, a novel flying modular robotic structure that is able to self-assemble in midair and cooperatively …
Read more "ModQuad: The Flying Structure that Self-Assembles in Midair"
A Decentralized Algorithm for Self Assembling Structures with Modular Robots
Recent work in the field of bio-inspired robotic systems has introduced designs for modular robots that are able to assemble into structures (e.g., bridges, landing platforms, fences) using their bodies as the building components. Yet, it remains an open question as to how to program large swarms of robotic modules so that the assembly task …
Read more "A Decentralized Algorithm for Self Assembling Structures with Modular Robots"